DVP15MC11T Operation Manual
Name Timing for changing to TRUE Timing for changing to FALSE
Busy When Execute changes to TRUE
When CommandAborted changes to TRUE
When Error changes to TRUE
Active
When the axis starts being
controlled by the instruction
CommandAborted
When Error changes to TRUE
CommandAborted
When the instruction execution is
aborted by other motion
instruction
When Execute changes from TRUE to
FALSE
CommandAborted is set to TRUE when the
instruction is aborted by other instruction after
Execute
changes from TRUE to FALSE in the
course of the instruction execution. One
period later, CommandAborted changes to
Error
When an error occurs in the
instruction execution or the input
parameters for the instruction are
When Execute changes from TRUE to
FALSE
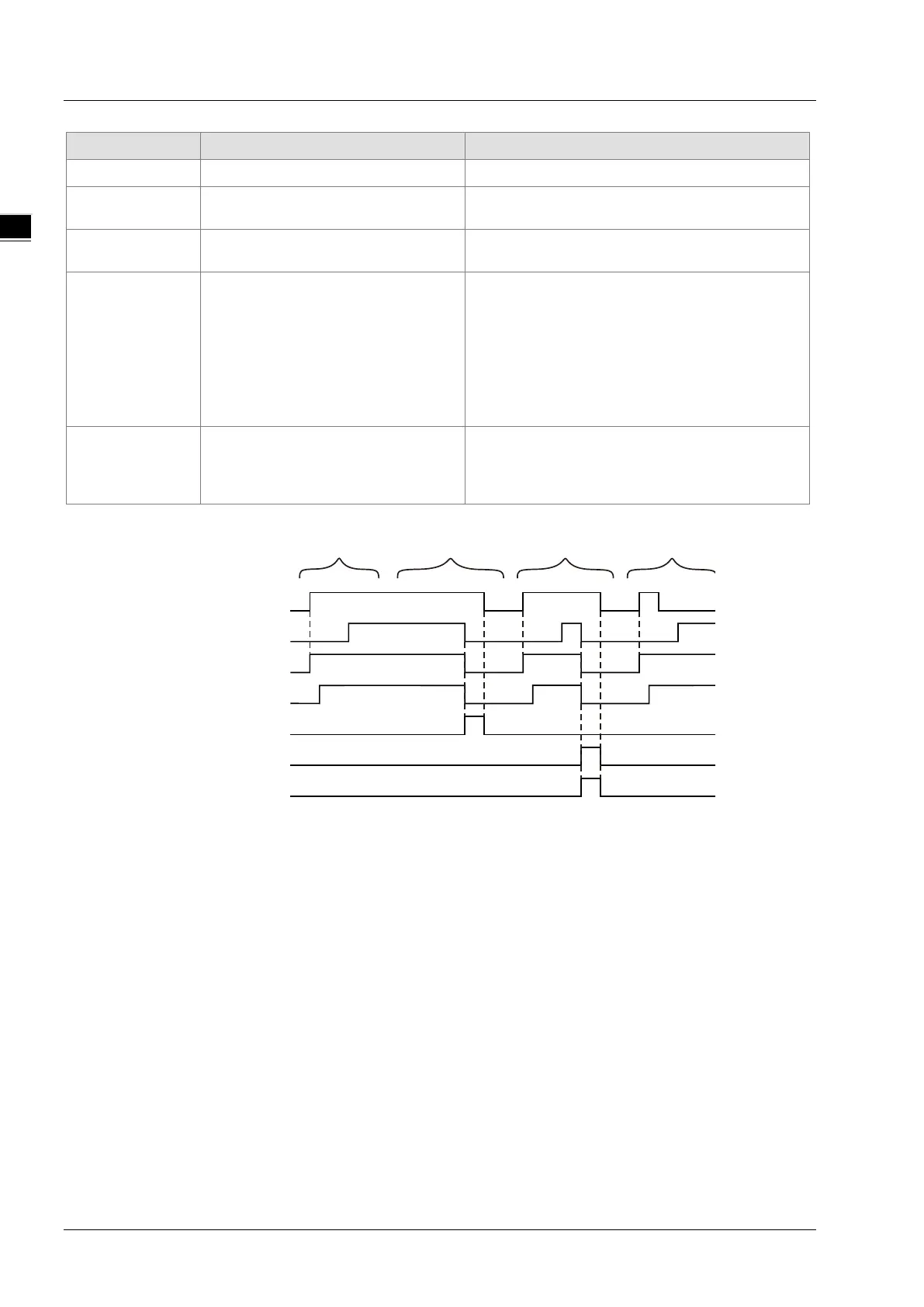
Output Update Timing Chart
Case 1: Busy changes to TRUE as Execute changes from FALSE to TRUE. One period later, Active
changes to TRUE. When the synchronous state is reached, InGear changes to TRUE and
meanwhile Busy and Active remain TRUE.
Case 2: When Execute changes to TRUE and the slave axis is controlled by other instruction,
MC_GearIn instruction is aborted by other instruction and CommandAborted changes to
TRUE. Meanwhile Busy and Active change to FALSE. When Execute changes from TRUE to
FALSE, CommandAborted changes to FALSE.
Case 3: When Execute changes from FALSE to TRUE and an error such as a parameter mistake
occurs, Error changes to TRUE and ErrorID shows corresponding error codes. Meanwhile
InGear, Busy and Active change to FALSE. As Execute changes from TRUE to FALSE, Error
changes to FALSE.
Case 4: After Execute changes from TRUE to FALSE in the process of execution of MC_GearIn,
InGear changes to TRUE and meanwhile Busy and Active remain TRUE.
Function
1. MC_GearIn is used for establishing an electronic gear relationship between two axes. After the
MC_GearIn instruction is executed, the slave axis performs the gear operation with the master axis
according to the parameters, RatioNumerator, RatioDenominator, Acceleration, Deceleration, Jerk
Execute
InGear
Busy
Active
CommandAbo rted
Error
Error ID
Case1
Case2 Case4
Case3
11-130