Chapter 12 Troubleshooting
1
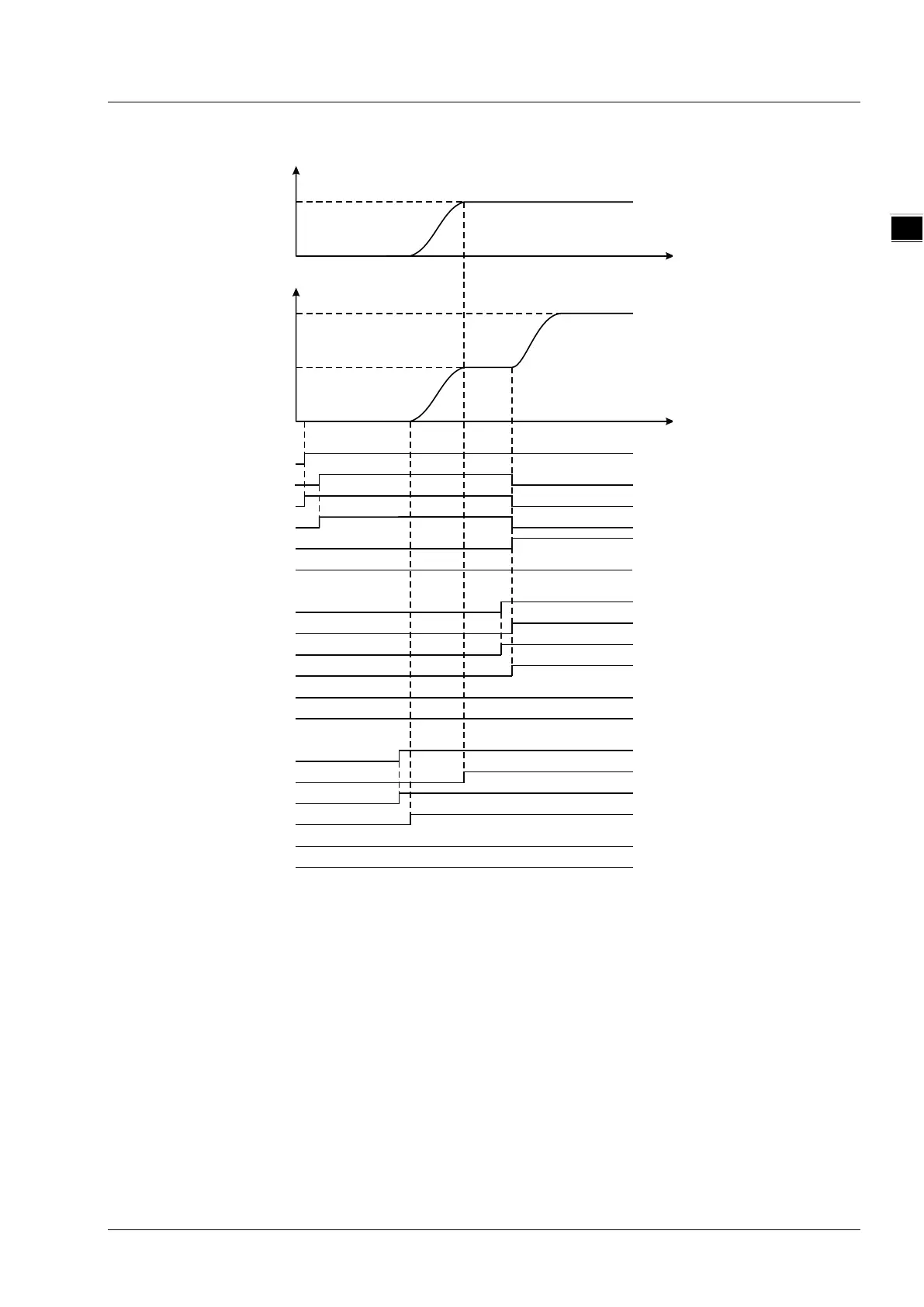
2. Motion Curve and Timing Charts:
In GearIn1, the values of RatioNumerator and RatioDenomenator are both 1. GearIn1_Ex
changes from FALSE to TRUE and meanwhile GearIn1 _Bsy changes to TRUE. One period
later, GearIn1_InGear changes to TRUE and the e-gear relationship between the master axis
and the slave axis is built.
Vel_Ex changes from FALSE to TRUE after the e-gear relationship between the master axis
and slave axis is built. One period later, Vel_Act changes to TRUE, the master axis performs
the velocity instruction and the slave axis follows the master axis for motion.
In GearIn2, the values of RatioNumerator and RatioDenomenator are 2 and 1 respectively.
GearIn2_Ex changes from FALSE to TRUE and meanwhile GearIn2 _Bsy changes to TRUE.
One period later, GearIn2_Act and GearIn1_Abt change to TRUE and the slave axis gets to the
target velocity based on the values of RatioNumberator, Ratio Denomenator,
MasterValueSource, Acceleration, Jerk and BufferMode specified by the GearIn2 instruction.
Since the values of RatioNumerator and RatioDenomenator in GearIn2 are 2 and 1
respectively, the target velocity of the slave axis is twice that of the master axis. When
GearIn2_InGear changes to TRUE, the velocity of the slave axis will be twice that of the master
axis.
GearIn1_Ex
GearIn1_InGear
GearIn1_Bsy
GearIn1_Act
GearIn1_Abt
GearIn1_Err
GearIn1
80000
Velocity
Time
40000
GearIn2_Ex
GearIn2_InGear
GearIn2_Bsy
GearIn2_Act
GearIn2_Abt
GearIn2_Err
GearIn2
Velocity
Time
40000
Vel_Ex
Vel_Invel
Vel_Bsy
Vel_Act
Vel_Abt
Vel Err
Vel
Master axis Axis1( )
Slave axis Axis2( )
11-133