DVP15MC11T Operation Manual
Output Update Timing Chart
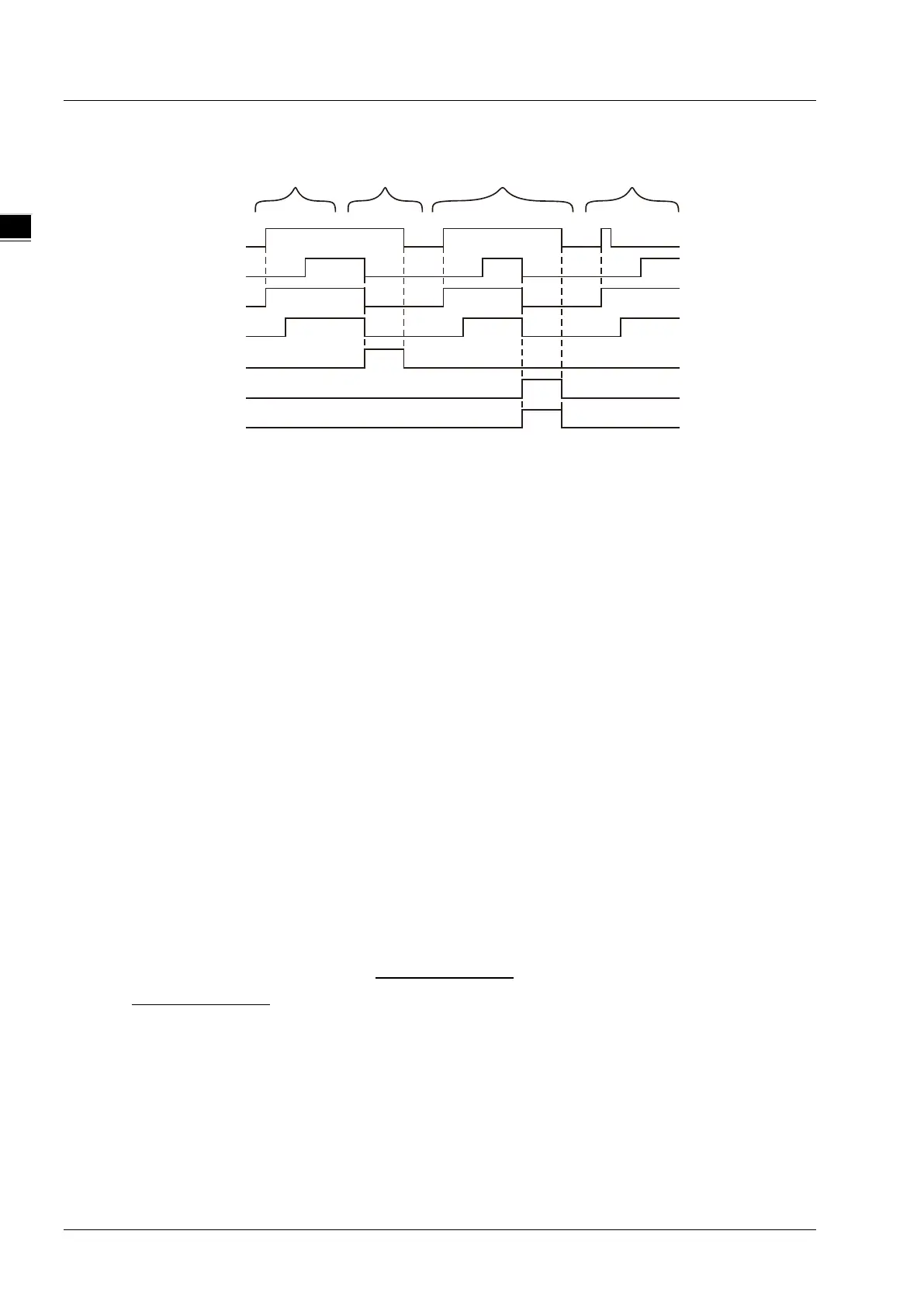
Case 1: When Execute changes from FALSE to TRUE, Busy changes to TRUE. One cycle later, Active
changes to TRUE. When the slave axis has synchronized with the two master axes, InSync
changes to TRUE and Busy and Active remain TRUE.
Case 2: When Execute is TRUE, Busy is TRUE and Active is TRUE. When the slave have
synchronized with the two master axes, InSync is TRUE. At the moment, the instruction is
aborted by another instruction, CommandAborted changes to TRUE and meanwhile Invelocity,
Busy and Active change to FALSE. When Execute changes from TRUE to FALSE,
CommandAborted changes to FALSE.
Case 3: When Execute changes from FALSE to TRUE, Error changes to TRUE and ErrorID shows
corresponding error codes when an error occurs such as axis alarms or offline. Meanwhile,
InSync, Busy and Active change to FALSE. When Execute changes from TRUE to FALSE,
Error changes to FALSE.
Case 4: The instruction is still executed and the states of Busy and Active do not change after Execute
changes from TRUE to FALSE during execution of the instruction. When the slave axis has
been synchronized with the two master axes, InSync changes to TRUE and Busy and Active
remain TRUE.
Function
MC_CombineAxes outputs the sum or difference of the position variations of two master axes as the
slave position variation.
Combine modes: Addition or Subtraction
The addition or subtraction of the position variations of master axis 1 and master axis 2 are
conducted and the calculation result is output as slave axis position variation.
CombineMode is set to 0
𝐏𝐨𝐬𝐢𝐭𝐢𝐨𝐧 𝐯𝐚𝐫𝐢𝐚𝐭𝐢𝐨𝐧 𝐨𝐟 𝐒𝐥𝐚𝐯𝐞 𝐚𝐱𝐢𝐬 =
Position variation of Master axis1 ×
GearRatioNumeratorM1
GearRatioDenominatorM1
+ Position variation of Master axis2 ×
GearRatioNumeratorM2
GearRatioDenominatorM2
Execute
InSync
Busy
Active
Error
ErrorID
Case 1
Abort
Case 2
Case 3
Case 4
11-142