DVP15MC11T Operation Manual
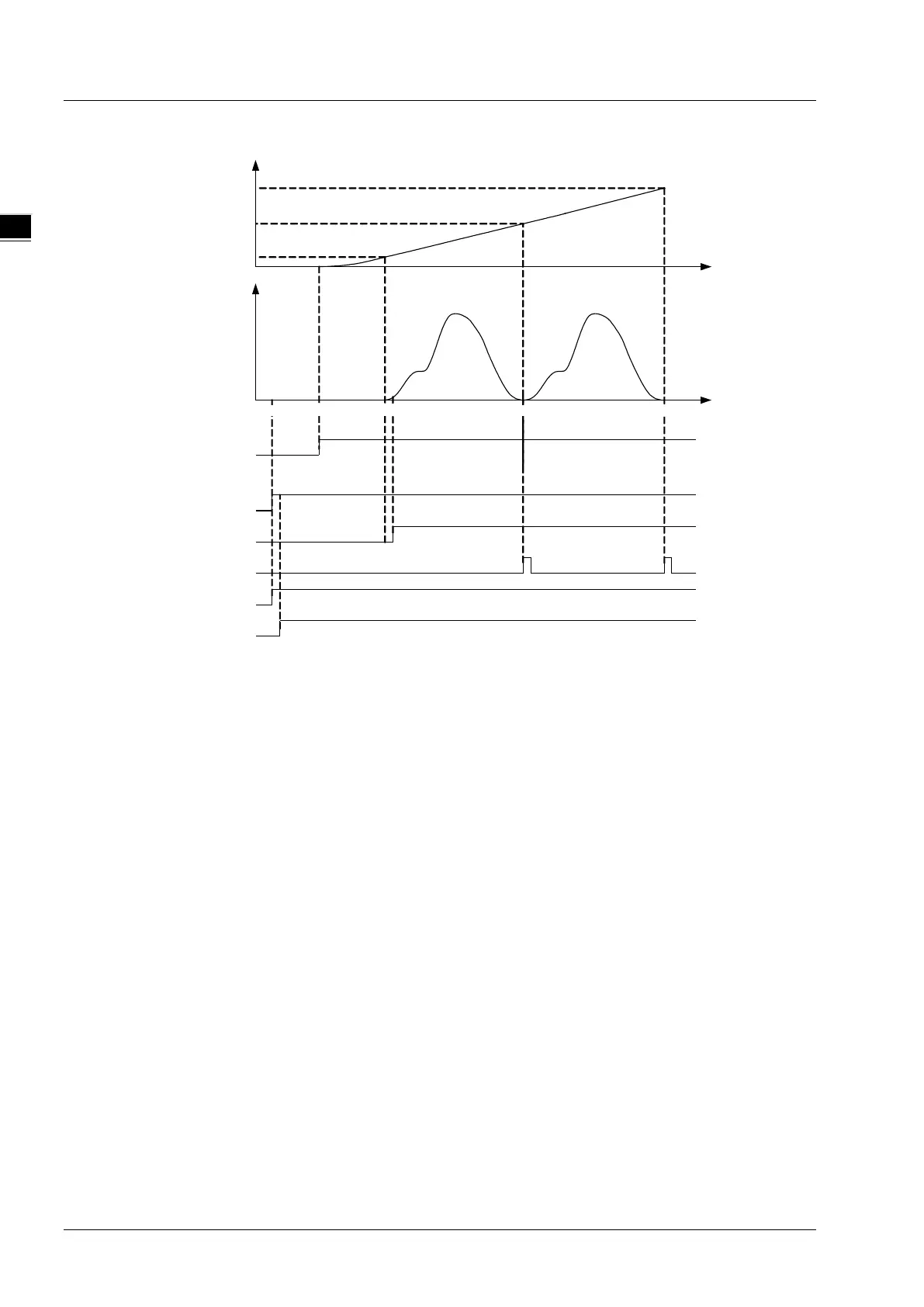
Motion curve and timing chart
As CamIn_Ex changes from FALSE to TRUE, the MC_CamIn instruction is executed and at the
moment of t1, both of the master axis and slave axis positions are 0. The value of
ActivationPosition is 100 and ActivationMode is 0, so the slave will not start to execute the
engagement action until the master axis position is 100 (the master axis position at the time of
t1 + ActivationPosition).
As Vel_Ex changes from FALSE to TRUE, the MC_MoveVelocity instruction is executed and at
the moment of t2, the master axis position is 0 and slave axis continues waiting for the start of
the engagement. After that, the master axis will move from 0 in the positive direction under the
control of the MC_MoveVelocity instruction.
When the master axis passes 100, the position where the engagement begins is reached at the
time of t3. The slave axis starts to perform the engagement action according to StartMode at
the moment of t3. The synchronization is achieved at t4 and the InSync output parameter
(CamIn1_InSync) changes from FALSE to TRUE.
Whenever the synchronous motion reaches the end point in a cam period as shown at t5 and t6,
the EndOfProfile output parameter (CamIn1_EndPro) will change to TRUE and it will change to
FALSE after a program period.
Maste r axis position
T ime
100
820
S axis p osition
lave
Ti me
300
0
0
460
CamIn_InSync
CamIn_EndOP
CamIn_Bsy
CamIn_Act
Cam_Abt
CamIn_Ex
Vel_Ex
Vel
CamIn
t1 t2
t
3
t4
t5 t6
11-168