6Functions
22 Festo – GDCP-CMMP-M0-FW-E N – 1304NH
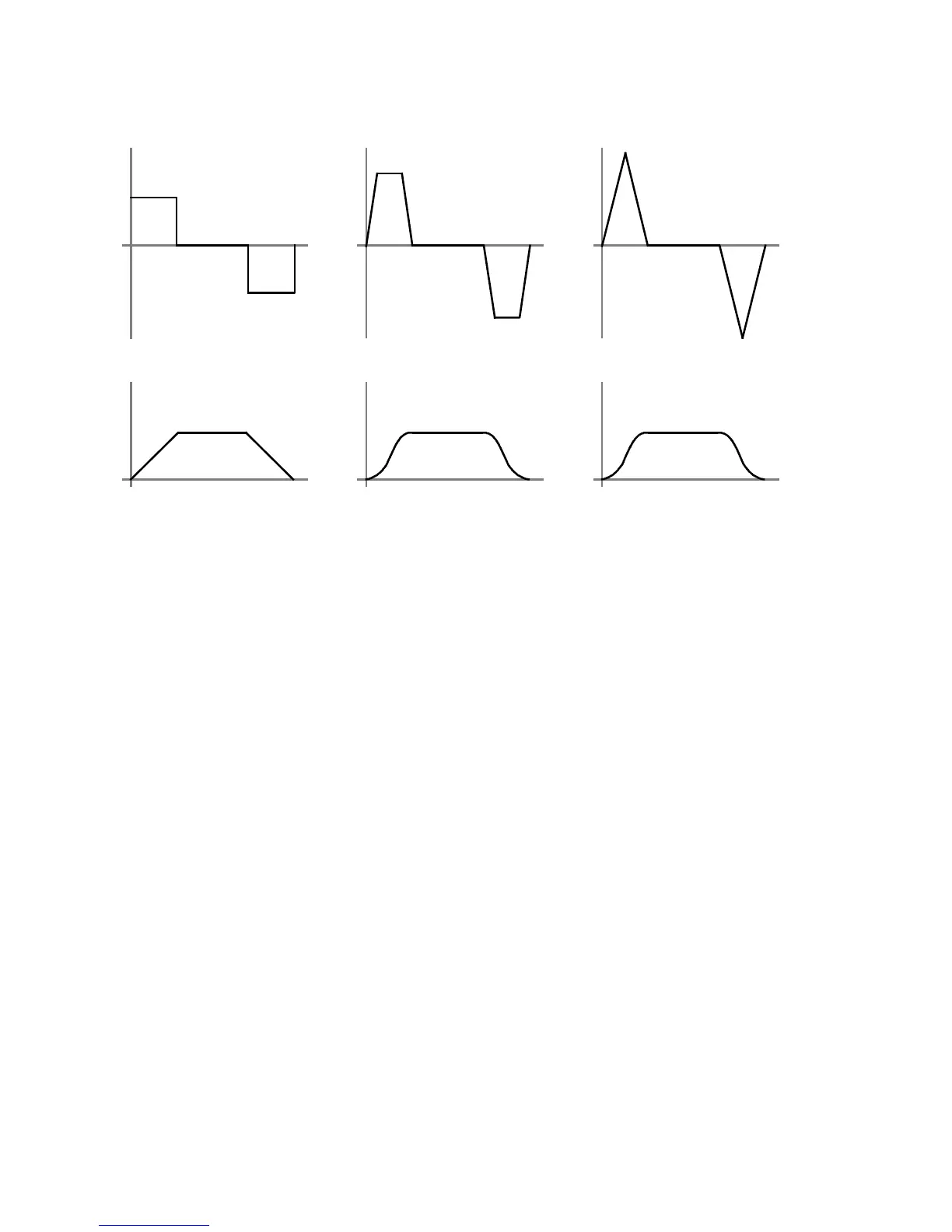
a(t) a(t) a(t)
123
v(t) v(t) v(t)
ttt
t1 t2 t3
1 Time-optimised = 0 %
2 Jerk-limited
3 Jerk-free = 100 %
Fig. 6.1 Positioning profiles
Start Condition
Start of a new positioning record with ongoing movement
– Ignore: Star t command is not carried out
– Wait: Terminate current record and then start selected record
– Interrupt: Canc el c urrent record and immediately star t new record.
Direction
Establishment of the direction of rotation when modulo positioning is active in the mode “Direction of
rotation from position record” is defined here. The following settings are possible:
– Positive: The direction of movement of the axis is always positive
– Negative: The direction of movement of the axis is always negative
– Auto: The direction of travel is determined automatically from the current position, target position
and additional options (absolute, relative, relative related to last target, etc.).
Command (record continuation)
Record continuation consists o f a defined sequence of positioning records. Each positioning record can
be used as a record sequence through parameterisation of its subsequent position and continuation
condition. The number of positions in a record sequence is limited only by the total number of positions
available.
The continuation condition for the next positioning record is determined through the “Command”
column of the positioning record table. The following commands are available:

 Loading...
Loading...










