6Functions
34 Festo – GDCP-CMMP-M0-FW-E N – 1304N H
Homing methods
hex Descriptiondec
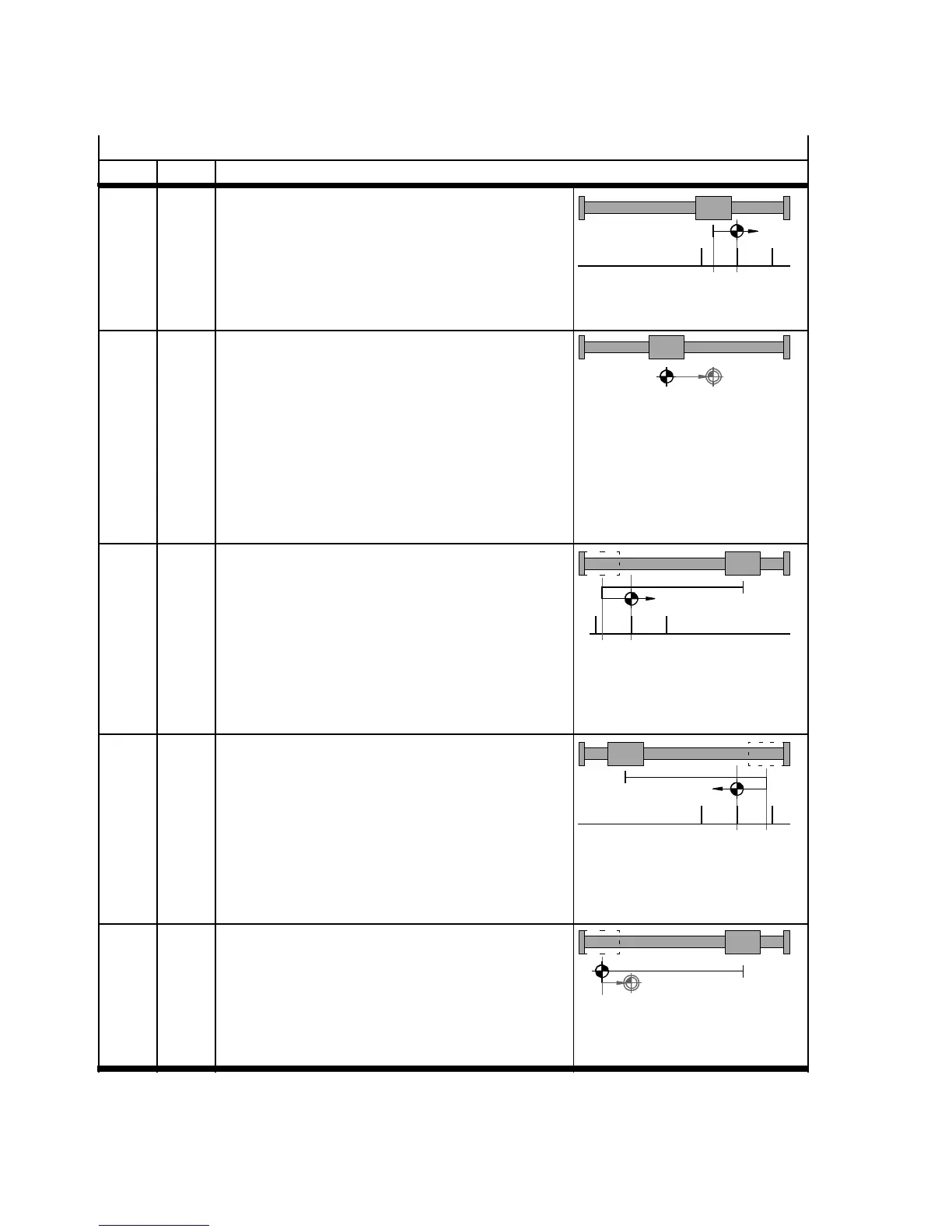
22h 34 Index pulse in positive direction
1)
1. Travel at creep speed in positive direction until
the index pulse. This position is taken as the
homing point.
2. If this is parameterised: travel at positioning
speed to the axis zero point.
Index pulse
23h 35 Current position
1. The current position is taken as the reference
position.
2. If this is parameterised: travel at positioning
speed to the axis zero point.
Note: Through shifting of the reference system,
travel to the limit switch or fixed stop is possible.
For that reason this method is mostly used for
axes of rotation.
FFh -1 Negative stop with index pulse
1)2)
1. Travel at search speed in negative direction to
the stop.
2. Travel at creep speed in positive direction until
the next index pulse. This position is taken as
the homing point.
3. If this is parameterised: travel at positioning
speed to the axis zero point.
Index pulse
FEh -2 Positive stop with index pulse
1)2)
1. Travel at search speed in positive direction to
the stop.
2. Travel at creep speed in negative direction
until the next index pulse. This position is
taken as the homing point.
3. If this is parameterised: travel at positioning
speed to the axis zero point.
Index pulse
EFh -17 Negative stop
1)2)3)
1. Travel at search speed in negative direction to
the stop. This position is taken as the homing
point.
2. If this is parameterised: travel at positioning
speed to the axis zero point.
1) Only possible for motors with encoder/resolver with index pulse.
2) Limit switches are ignored during travel to the stop.
3) Since the axis is not to remain at the stop, the travel to the axis zero point must be parameterised and the axis zero point offset
mustbe≠0.

 Loading...
Loading...










