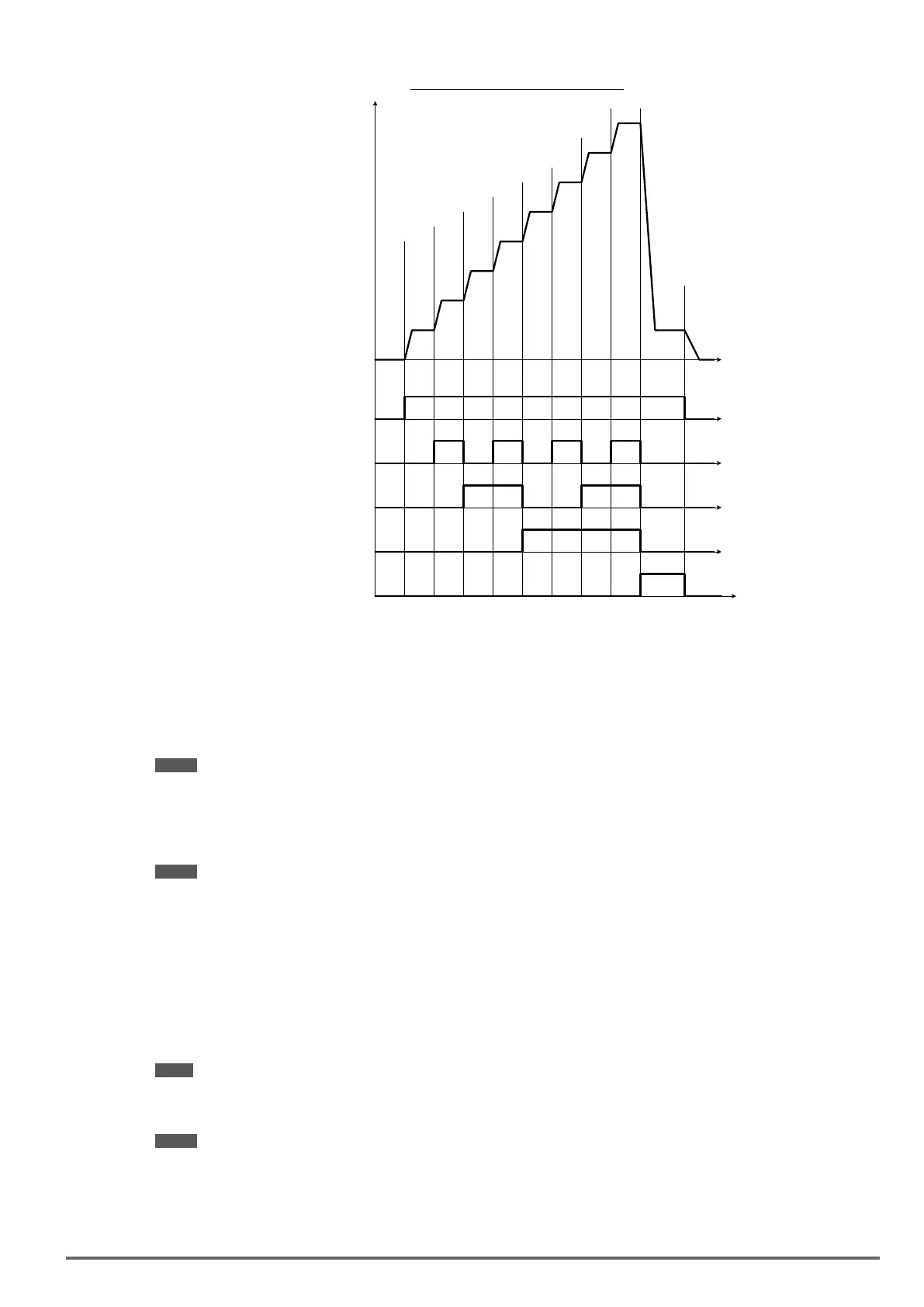
Figure4.4.18:9-speedtimingdiagram
1
0 000
00
0
000
000 00
11
1111
1
11
111
Termina
l
(S1)
(S5)
(S6)
(S7)
(S8)
Forward RUN
Multi- step
speed Ref 1
Multi- step
speed Ref 2
Multi- step
speed Ref 3
JOG Frequency
Ref
speed
1
speed
2
speed
3
speed
4
speed
5
speed
6
speed
7
speed
8
speed
9
*1
master
speed
ref
*2
aux.
speed
ref
t
t
t
t
t
t
Frequency
Reference
(05-01)
(00-18)
(05-02)
(05-03)
(05-04)
(05-05)
(05-06)
(05-07)
(05-08)
*1. When 00-05=1, multi-speed frequency reference is set by analog input AI1 or AI2. When 00-05=0, mul-
ti-speed frequency reference is set by 05-01.
*2. When 04-05=0, multi-speed frequency reference is set by Auxiliary frequency (AI2). When 04-05≠0, mul-
ti-speed frequency reference is set by 05-02.
03-0X =06: Forward jog run command, uses jog frequency parameter 00-18.
Note: - Jog command has a higher priority than other frequency reference commands.
- Jog command uses stop mode set in parameter 07-09 when Jog command is active > 500ms.
03-0X =07: Reverse jog run command, uses jog frequency parameter 00-18.
Note: - Jog command has a higher priority than other frequency reference commands.
- Jog command uses stop mode set in parameter 07-09 when Jog command is active > 500ms.
03-0X =08: UP frequency command; set parameter 00-05 Frequency command to 2 to activate. Refer to pa-
rameter 11-56 for UP/DOWN mode.
03-0X =09: Down frequency command; set parameter 00-05 Frequency command to 2 to activate. Refer to
parameter 11-56 for UP/DOWN mode.
Note: UP/DOWN frequency command follows standard acceleration and deceleration times Tacc1 / Tdec1 (00-14, 00-15) or
Tacc2 / Tdec 2 (00-16, 00-17) and requires both UP and DOWN functions 08 and 09 to be programmed to the digital
input terminals.
Note: SE02 DI terminal Error will be displayed when:
- When only the UP or DOWN command function is programmed to the digital inputs.
- When both DOWN command and Inhibit Acceleration/deceleration command are activated simultaneously.
- When both UP command and Inhibit Acceleration/deceleration command are activated simultaneously.
VDI100 • Instruction manual 147
 Loading...
Loading...








