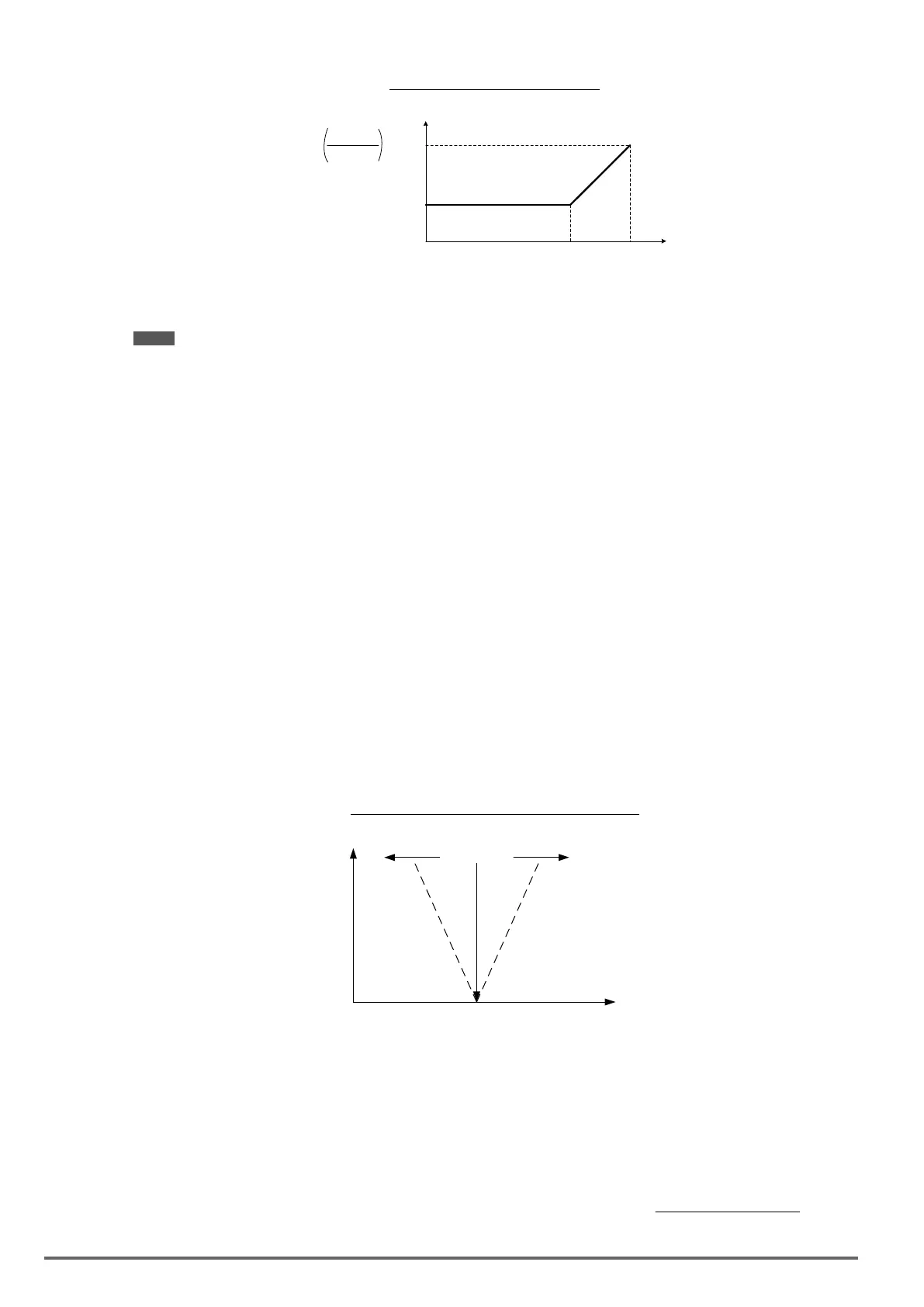
Figure4.4.100Slipcompensationlimit
Slip Compensation Limit
18-04
18-04
F
base
F
max
(01-12) (01-02)
01-02
01-12
×
When the slip compensation gain 18-00 at low speed is adjusted, and the actual motor speed is still lower than
the reference frequency, the motor may be limited by the slip compensation limit.
Note: Make sure that the slip compensation limit 18-02 does not exceed the maximum allowed system limit.
18-03: Slip compensation lter
Set slip compensation lter time in V/f mode
18-04: Regenerating slip compensation selection
The selections to enable or disable the slip compensation function during regeneration.
To enable slip compensation during regeneration caused by deceleration (SLV mode), set 18-04 to 1 in case
speed accuracy is required. When the slip compensation function is used regenerative energy might increase
temporarily (18-04= 1) therefore a braking module might be required.
SLV mode adjustment
18-00: Slip compensation gain
a) Slip compensation can be used to control the full rang speed accuracy under load condition.
b) If the speed is lower than 2 Hz and the motor speed decreases, increase the value of 18-00.
c) If the speed is lower than 2 Hz and the motor speed increases, reduce the value of 18-00.
Slip compensation gain uses a single value for the whole speed range. As a result the slip compensation accu-
racy at low speed is high but slight inaccuracies might occur at high speeds.
Adjust parameter 18-02 together with the compensation value or continue to adjust 18-00 if the speed accuracy
at higher speed is not acceptable. Please note adjusting these parameters might impact the accuracy at lower
speeds.
The impact of 18-00 on the torque and the speed are shown in gure 4.4.101.
Figure4.4.10118-00Effectonthetorqueandspeed
Torque
Speed
Decrease 18-00
Increase 18-00
18-01: Slip compensation gain at high speed
It is not required to adjust the Slip compensation gain at high speed if the motor is loaded. After adjusting pa-
rameter 18-00 it is recommended to increase the reference frequency and check the motor speed. In case of a
speed error increase the value of 18-01 to adjust the compensation. Increase the motor rated frequency (01-12
base frequency) and increase the value of 18-01 to reduce the speed error. If the speed accuracy becomes
worse due to an increase in motor temperature it is recommended to use a combination of 18-00 and 18-01 for
adjustment.
Compared to 18-00, 18-01 serves as a variable gain for the full speed range. Parameter 18-01 determines the
slip compensation at the motor rated speed and is calculated follows:
Reference Frequency
Slip Compensation Gain = (Slip Compensation Gain at low speed + Slip Compensation Gain at high speed) x
Motor rated frequency (01-12)
258 VDI100 • Instruction manual

 Loading...
Loading...







