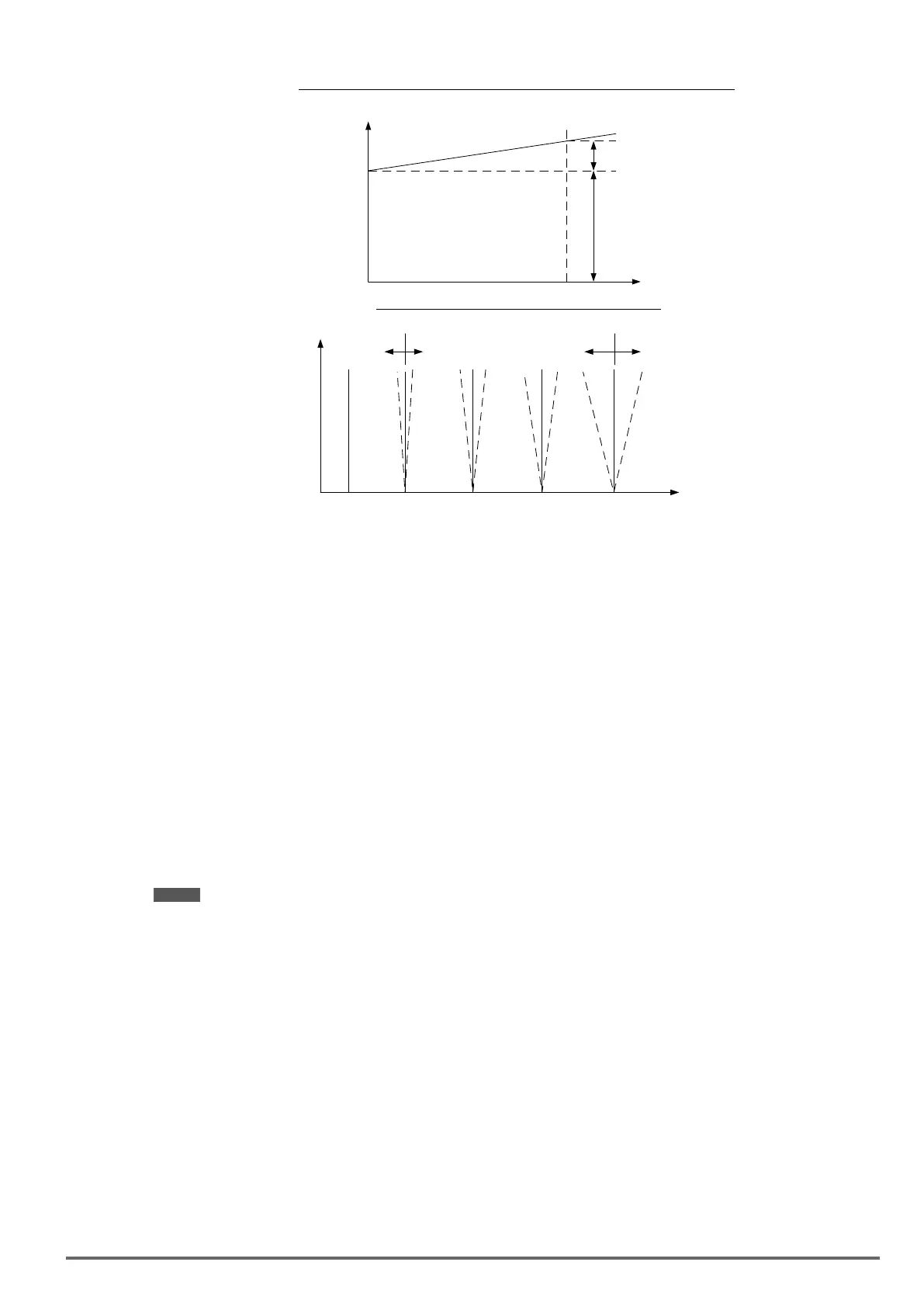
Figure4.4.10218-00/18-01Slipcompensationgainversusfrequencyreference
Slip compensation
Frequency
Reference
18-01
18-00
Figure4.4.10318-01Effectontorquespeedcurve
Speed
18-01
Decrease
18-01
18-01
Increase
18-01
18-05: FOC (Flux Orient Control) delay time
In the SLV mode, the slip compensation of the magnetic ux depends on the torque current and excitation
current. If the motor load rises above 100% while running at the motor rated frequency, the motor voltage and
resistance drops sharply, which may cause the inverter output to saturate and current jitter occur. The magnetic
ux slip compensation will independently control the torque current and the excitation current to prevent current
jitter. For slow speed or xed speed operation, 18-05 may be increased. For fast operation adjust 18-06.
18-06: Slip compensation gain
If the motor is jittering at the rated frequency under full load, the value of 18-06 may gradually be reduced to
zero to reduce current jitter.
SLV2 mode adjustment
Default value of parameter 18-00 is 0.0. ( when 18-00 = 0.0, slip compensation function is off.)
Adjustment of slip compensation gain (18-00) is the following:
a) Correctly set the rated slip and no-load current (02-00).
b) Set slip compensation gain (18-00).
c) Run under load. Measure the speed and adjust slip compensation gain (18-00) with the unit of 0.1.
Notes:
- If the motor speed is lower than the target speed, increase the setting value of low-speed slip compensation
gain (18-00).
- If the motor speed is higher than the target speed, reduce the setting value of low-speed slip compensation
gain (18-00).
VDI100 • Instruction manual 259

 Loading...
Loading...







