Busaufbau
16 A01185_11_X00_00 HBM: public CANHEAD
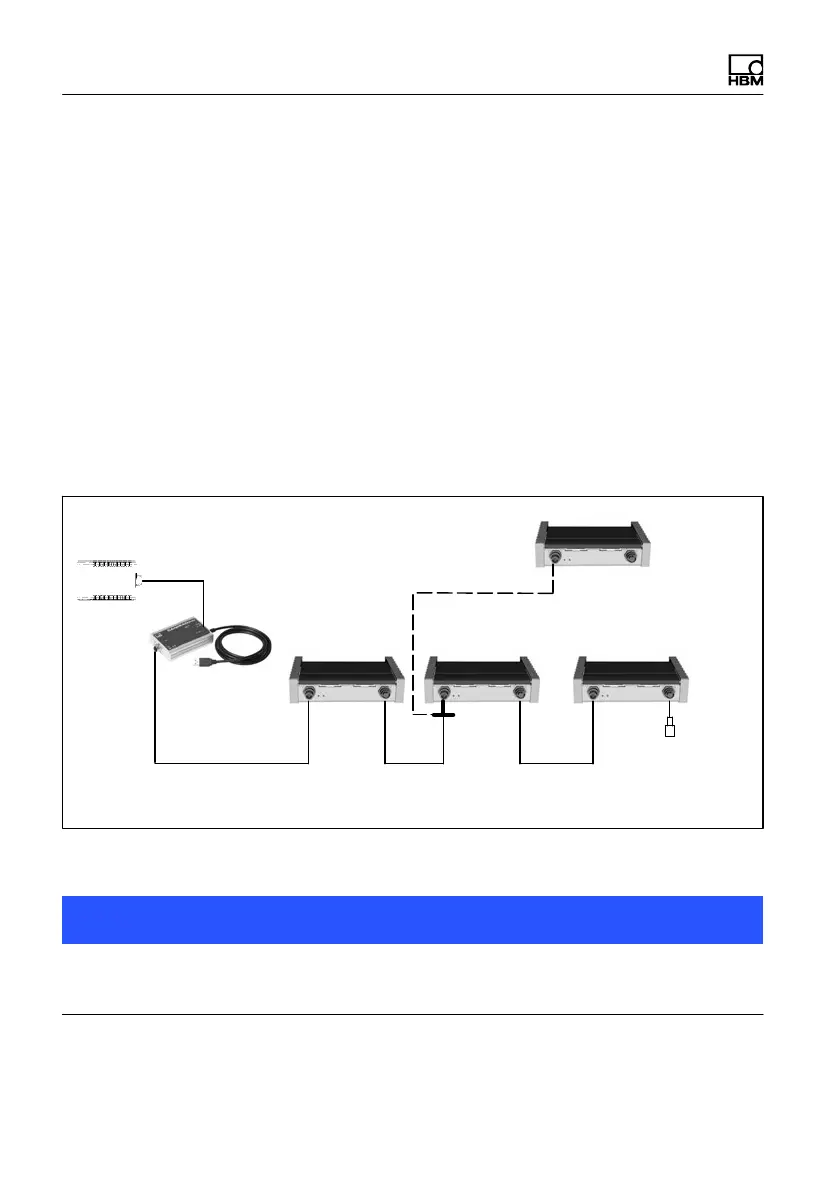
5.2 Busaufbau mit CANHEADdirect
CANHEADdirect besteht aus einer Hardware-Schnittstelle und einer API (Ap
plication Programming Interface). Mit dem CANHEADdirect‐Modul können Sie
CANHEAD‐Module direkt an einen PC (USB‐Anschluss) anschließen.
Über ein Netzteil wird das CANHEADdirect-Modul mit Spannung versorgt
(10...30 V). Die Datenübertragung zwischen den CANHEAD Modulen und dem
CANHEDdirect erfolgt über einen CAN-Bus (siehe auch Kapitel 9).
Die PC‐interne API kommuniziert über das CANopen‐Protokoll mit den CAN
HEAD Modulen. Über CANHEADdirect kann die Spannungsversorgung des
CAN-Bus ein‐ und ausgeschaltet werden, um einen Bus‐Reset durchzuführen.
Mit einem Beispielprogramm kann die Funktionalität des Systems überprüft
und mit der HBM‐Software catman die Sensoren parametriert werden.
Abschluss
widerstand
CAN‐Bus Linienstruktur mit Trunk‐ und Drop‐Leitungen
10
Mess
kanäle
10 Messkanäle
maximal 5 CANHEAD‐Module
T‐Stück
kein Abschlusswider
stand nötig
10
Mess
kanäle
10
Mess
kanäle
NTX001
CANHEADdirect
Abb. 5.2 Verbindung zu CANHEADdirect
Hinweis
Vorzugsweise sollte der CAN-Bus in einer Linienstruktur (keine Abzweigungen)
verlegt werden. Das T‐Stück nur eingangsseitig verwenden.