D2 Drive User Guide v1.8 3. Operation Principles
HIWIN Mikrosystem Corp. 24
3.1. Operation modes
The following operation modes can be used to implement the interface between the standard
D2 drive and the host controller.
(1) Position mode;
(2) Velocity mode;
(3) Force/torque mode;
(4) Stand-alone mode.
Each mode is described as follows.
3.1.1. Position mode
The host controller sends pulses to drive. These pulses are equal to position commands.
When the drive receives a pulse, it moves the motor with a corresponding distance. The host
controller is responsible for path planning. The pulse is sent faster and faster at the
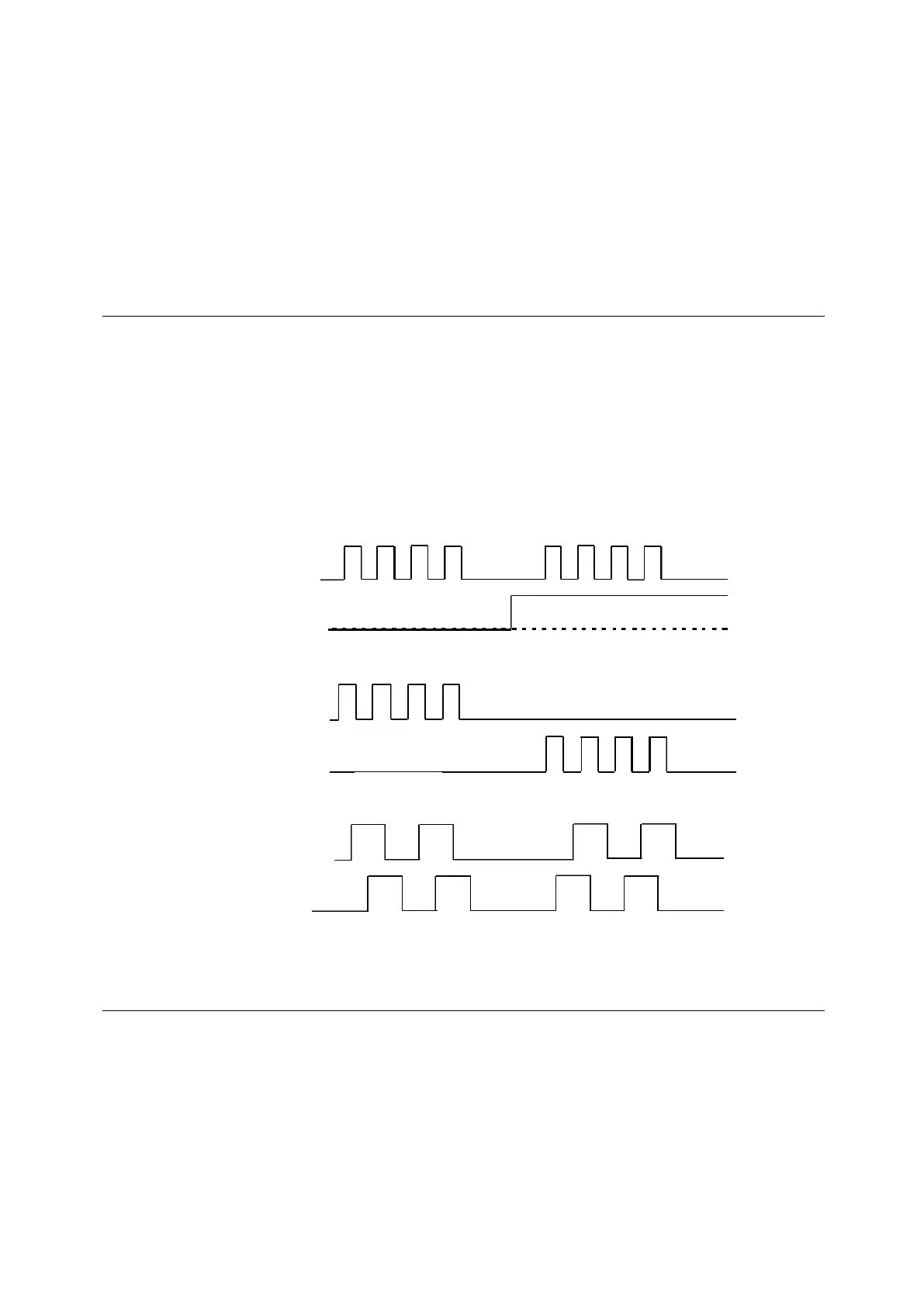
acceleration, and is sent with a fixed frequency at the constant speed. As shown in Fig. 3-1,
there are three formats of pulse signal: pulse/direction (pulse/dir), pulse up/pulse down
(CW/CCW), and quadrature (AqB). Based on the hardware wiring, the pulse signal can be
classified into the differential and single-end TTL logic signals.
The electronic gear can be set in the position mode. One input pulse is normally set to be
equal to one encoder count. For example, the gear ratio of 2:3 means that 2 input pulses is
equal to 3 encoder counts.
Fig. 3-1
3.1.2. Velocity mode
The drive can receive the command from the host controller via voltage, so as called V
command. The input voltage range is from -10 V to +10 V. The drive converts the received
external voltage to the corresponding velocity command to drive the motor. Besides the
voltage, the host controller can also send the velocity command via PWM signal, so as called
PWM command. It utilizes different duty cycles to correspond to different velocity commands.
There are two types of PWM command: single-line type (PWM 50%) and dual-line type (PWM
100%). The single-line type (PWM 50%) takes the duty cycle of 50% as the basis. If the duty
cycle of PWM command is less than 50%, the motor performs the reverse motion; while if
greater than 50%, the motor performs the forward motion. In addition to using one pin to
transmit PWM command, the dual-line type (PWM 100%) needs another pin to control motion