D2 Drive User Guide v1.8 5. Drive Configuration
HIWIN Mikrosystem Corp. 94
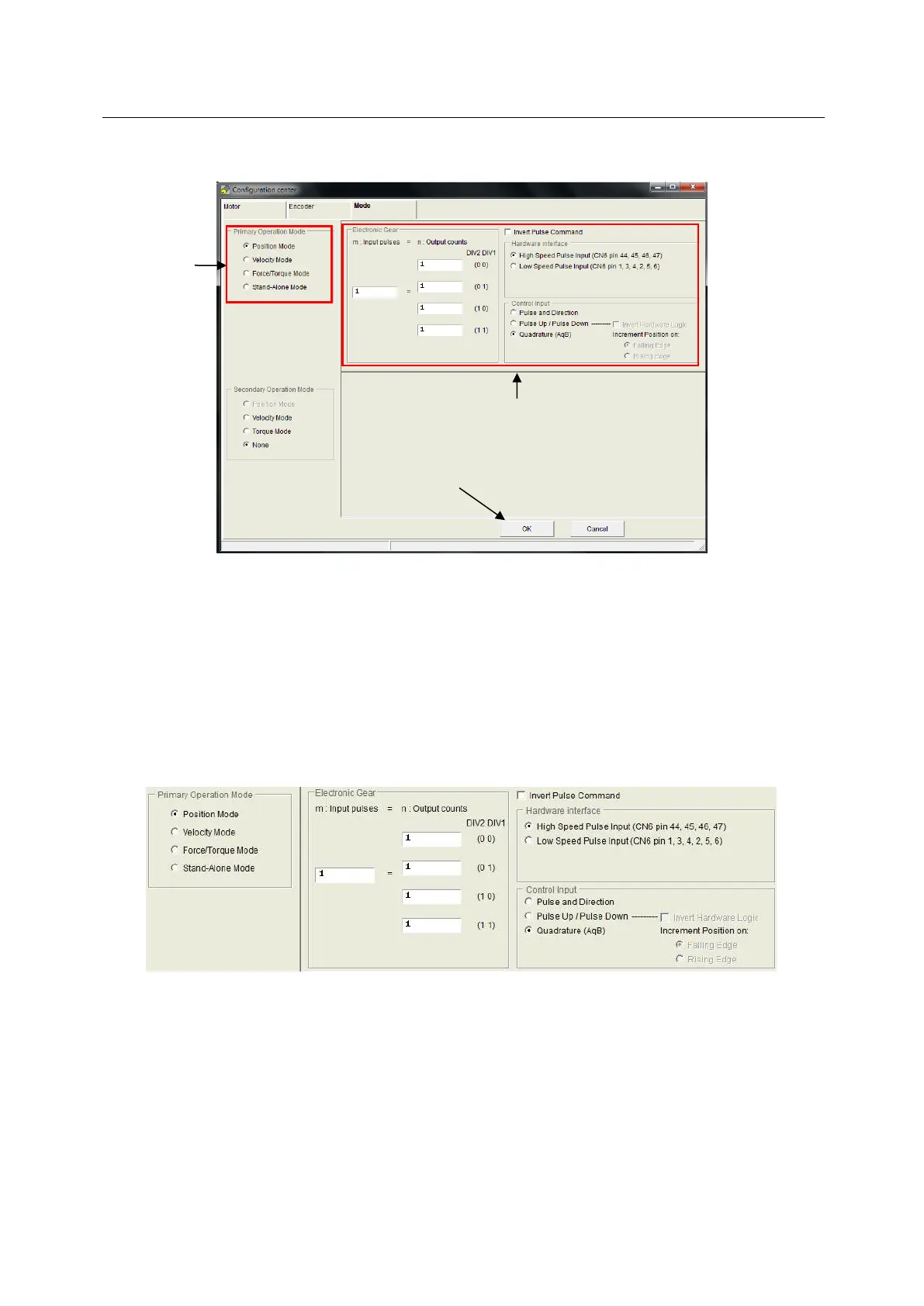
5.2.3. Operation mode configuration
The configuration page for the operation mode is shown in Fig. 5-27. After parameters of the
previous two steps have been set, the last step is to set the operation mode for the drive.
Fig. 5-27 Operation mode configuration page
(1) Position mode
To work with the host controller only sending pulse commands, the position mode should
be chosen to receive the external pulse command for the motion. The closed-loop control
is done by the drive. D2 drive supports three formats of pulse command. Also, the
electronic gear ratio is allowed to be set for the high-speed application.
Note 1. Only at the status of servo ready, the drive accepts the pulse command sent by
the host controller.
Note 2. For the framework of dual-loop control, only the position mode and stand-alone
mode can be selected.
Fig. 5-28
(2) Velocity mode
To work with the host controller sending analog commands or PWM commands, the drive
can be set to the velocity mode. Only the ratio (“Scaling”) between the external command
and velocity has to be set, where the unit is the corresponding relationship between 1V
and mm/s or rpm, or between Full PWM and the maximum speed. If “Scaling” is set to a
negative value, the motor will move in the reverse direction.
Parameters
OK/Cancel
button