D2 Drive User Guide v1.8 5. Drive Configuration
HIWIN Mikrosystem Corp. 93
(3) Output Z-phase signal to host controller
For AC servo motor with the 17-bit encoder, the Z-phase signal can be sent out to the
host controller by setting the encoder output to “Use emulated encoder”, as shown in Fig.
5-24. Before using this function, the encoder output must be set to “Use emulated
encoder”, and following two parameters should be set:
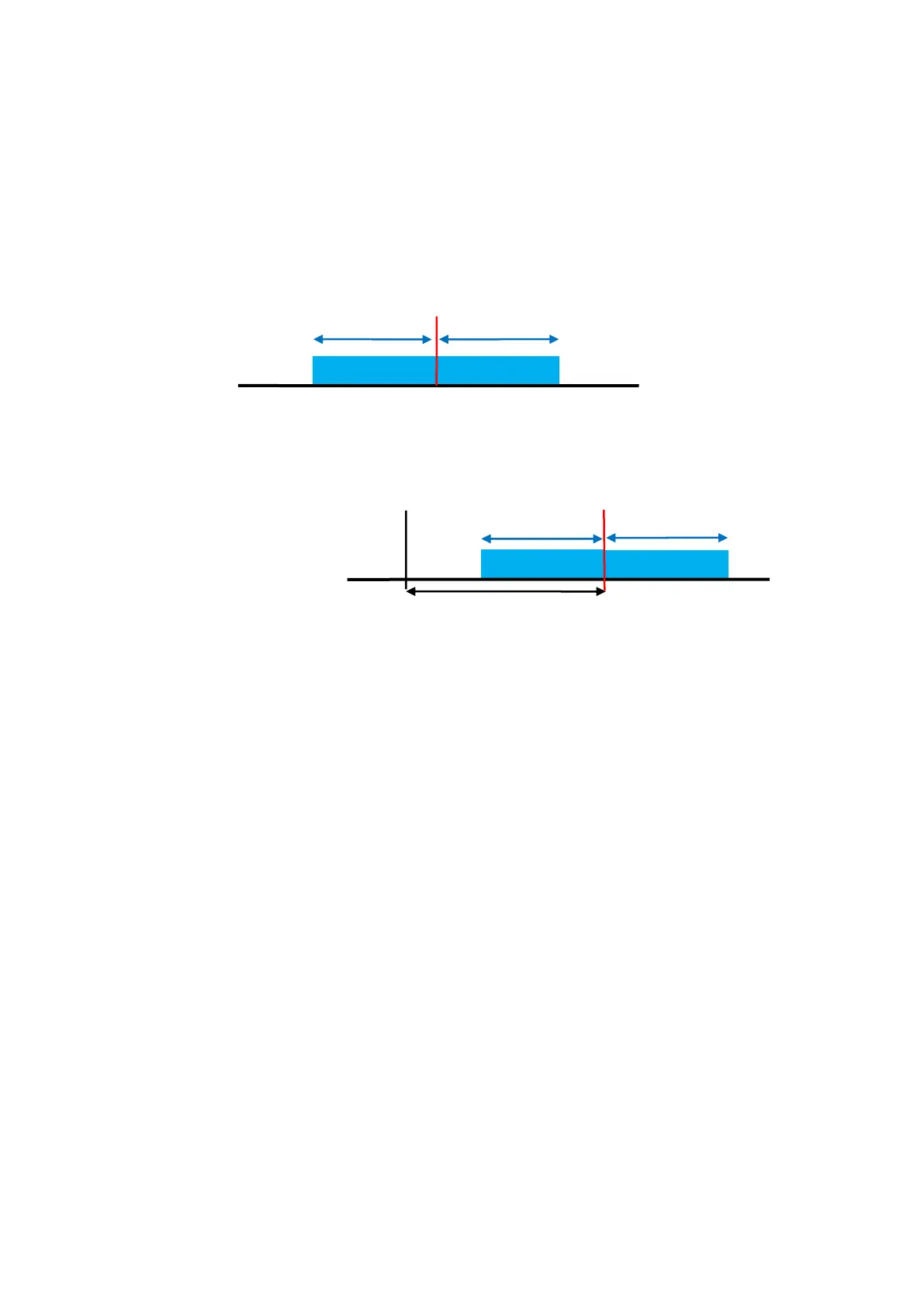
a. Emulated index radius: the output range of emulated Z-phase signal, as shown in
Fig. 5-25.
b. Emulated index jitter filter: reducing the bounce phenomenon of emulated Z-phase
signal.
Fig. 5-25
When the home offset function is used for homing, the emulated Z-phase signal will move
to the home position after home offset, as shown in the following figure.
Fig. 5-26
The output method of emulated Z-phase signal:
a. If the option of “Emulated Index Output in every revolution” is not checked, the drive
sends out the Z-phase signal only when it reaches the index position at the first time.
b. If the option of “Emulated Index Output in every revolution” is checked, the drive
sends out the Z-phase signal every time when it reaches the index position.
Center of emulated Z-phase signal
Center of emulated Z-phase signal