D2 Drive User Guide v1.8 5. Drive Configuration
HIWIN Mikrosystem Corp. 92
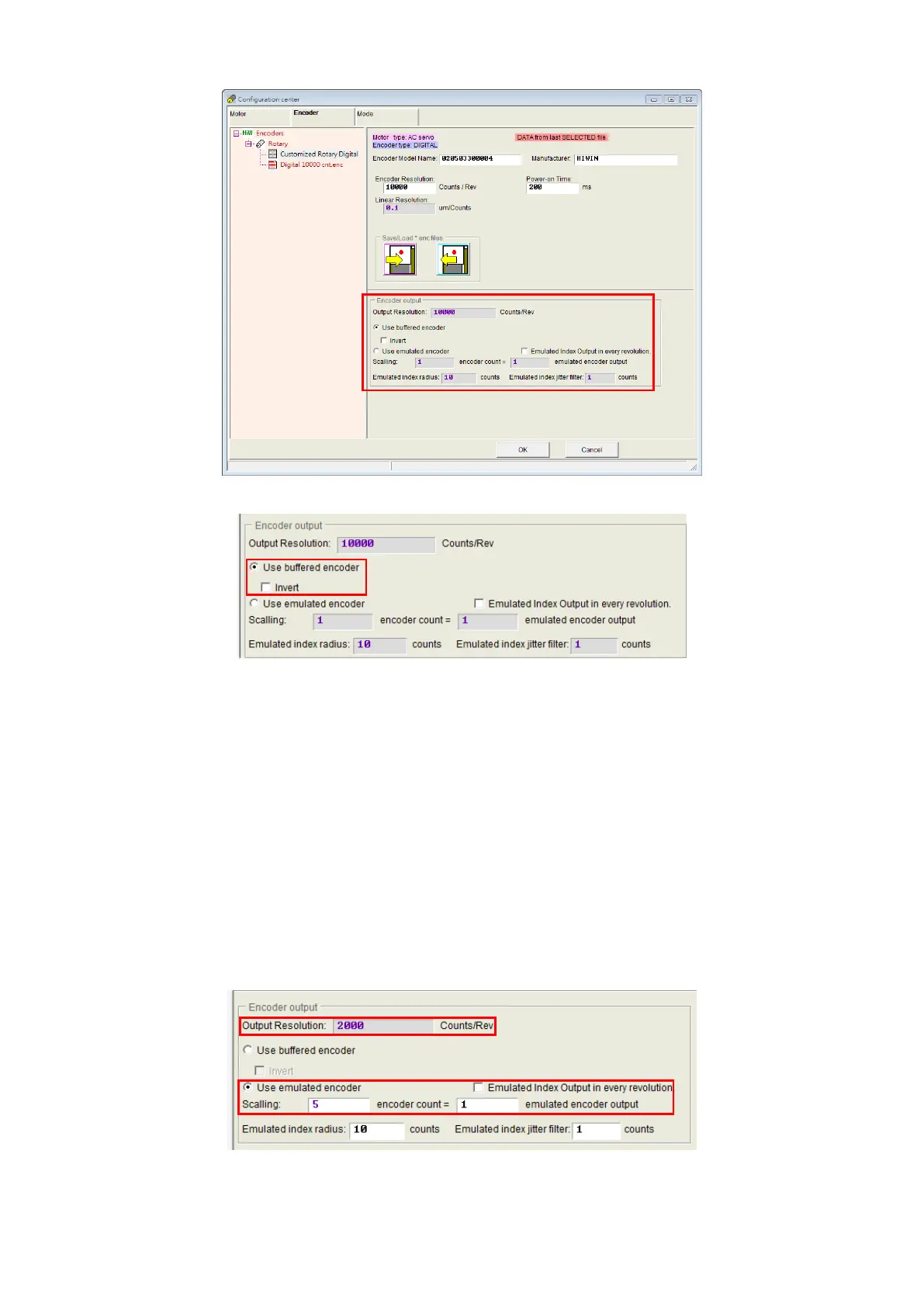
Fig. 5-22 Encoder output setting area
Fig. 5-23 Buffered encoder output
(2) Emulated encoder output
When this option is selected, the drive will multiply the received encoder position by
“Scaling” and send the result to the host controller. If the ratio is 1:1, the drive will directly
output the encoder signal based on the adopted encoder and the set resolution. At the
some cases, the host controller cannot receive the encoder signal with a high frequency.
Hence, a different ratio can be used, e.g., 5 encoder counts = 1 emulated encoder output.
On the other hand, if the multiplier factor of analog encoder is set too small, “Scaling”
might be needed to reduce the resolution of encoder output. The output direction can be
changed by setting 1 encoder count = -1 emulated encoder output. Taking the emulated
encoder output in Fig. 5-25 as an example, the encoder resolution is 10,000 counts/rev
and the scaling for emulated encoder output is 5 encoder counts = 1 emulated encoder
output. Therefore, “Output Resolution” is zoomed in to 2,000 counts/rev.
Note: The function of emulated encoder output will temporarily loss efficacy when
parameters are saved to Flash.
Fig. 5-24 Emulated encoder output