Appendix A Parameters Shenzhen Hpmont Technology Co., Ltd.
- 118 - HD3N Series User Manual V1.1
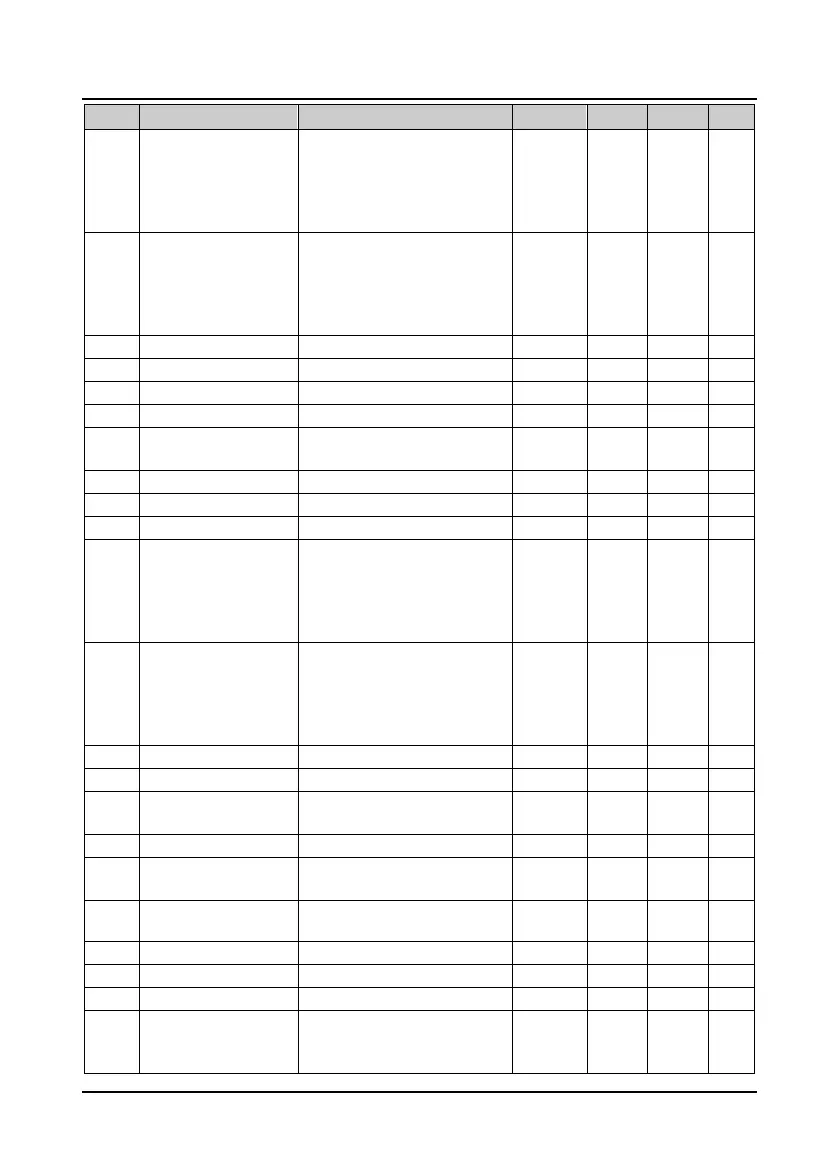
Function
Setting Range Default
Unit
Attribute Setting
F04.01 Setting channel selection
0: Digital
1: Analogue
2: Terminal pulse
3 - 4: AI1 - AI2
7: Potentionmeter ( LED keypad)
0 1
×
F04.02
Feedback channel
selection
0: Analogue
1: Terminal pulse
2: AI1 - AI2
6: Potentionmeter (LED keypad)
7: Speed closed-loop
0 1
×
F04.03 Setting digital reference -100.0 - 100.0% 0.0% 0.1%
○
F04.04 Proportional gain (P1) 0.0 - 500.0 50.0 0.1
○
F04.05 Integral time (I) 0.01 - 10.00s 1.00s 0.01s
○
F04.06 Integral upper limit 0.0 - 100.0% 100.0% 0.1%
○
F04.07 Differential time (D1)
0.00 - 10.00s
0.00s: F04.07 is invalid
0.00s 0.01s
○
F04.08 Differential upper limit 0.0 - 100.0% 20.0% 0.1%
○
F04.09 Sampling time (T) 0.01 - 50.00s 0.10s 0.01s
○
F04.10 Bias limit 0.0 - 20.0% (setting) 0.0% 0.1%
○
F04.11
Upper limit channel of PID
regulator
0: Set by F04.13
1: Analogue
2: Terminal pulse
3 - 4: AI1 - AI2
7: Potentionmeter ( LED keypad)
0 1
×
F04.12
Lower limit channel of PID
regulator
0: Set by F04.14
1: Analogue
2: Terminal pulse
3 - 4: AI1 - AI2
7: Potentionmeter ( LED keypad)
0 1
×
F04.13 PID regulator upper limit
0.0 - 100.0% 100.0% 0.1%
×
F04.14 PID regulator lower limit
0.0 - 100.0% 0.0% 0.1%
×
F04.15
Regulating characteristic
of PID regulator
0: Positive characteristic
1: Negative characteristic
0 1
×
F04.17 PID output filtering time
0.01 - 10.00s 0.05s 0.01s
○
F04.18
REV selection when PID
outputs
0: Prohibit REV when PID regulates
1: Permit REV
0 1
×
F04.19
REV frequency upper limit
of PID output
0.0 - 100.0% 100.0% 0.1%
×
F04.20 Proportional gain (P2) 0.0 - 500.0 50.0 0.1
○
F04.21 Integral time (I2) 0.01 - 10.00s 1.00s 0.01s
○
F04.22 Differential time (D2) 0.00 - 10.00s 0.00s 0.01s
○
F04.23
PID parameter adjustment
bases
0: Do not adjust
1:DI
2: Bias
0 1
○

 Loading...
Loading...

