Technical data
Page 48
4.5.1 Resolver connection [X2A]
The 9-pin D-SUB connection [X2A] is used to evaluate standard resolvers. Single- and multi-pole resolvers are supported. The
user can state the number of pairs of poles of the servo motor in
the "Motor Data" menu of the item Motion Soft
®
parameterization program so that the
item C 1-Series determines the speed correctly. However, the number of pairs of poles can also be identified automatically.
The number of pairs of poles of the motor (P
0Motor
) is always an integer multiple of the number of pairs of poles of the resolver
(P
0Resolver
). Wrong combinations such as, for example, P
0Resolver
= 2 and P
0Motor
= 5 lead to an error message during motor
identification.
The resolver offset angle, which is determined automatically during the identification, is readable and writeable for service
purposes.
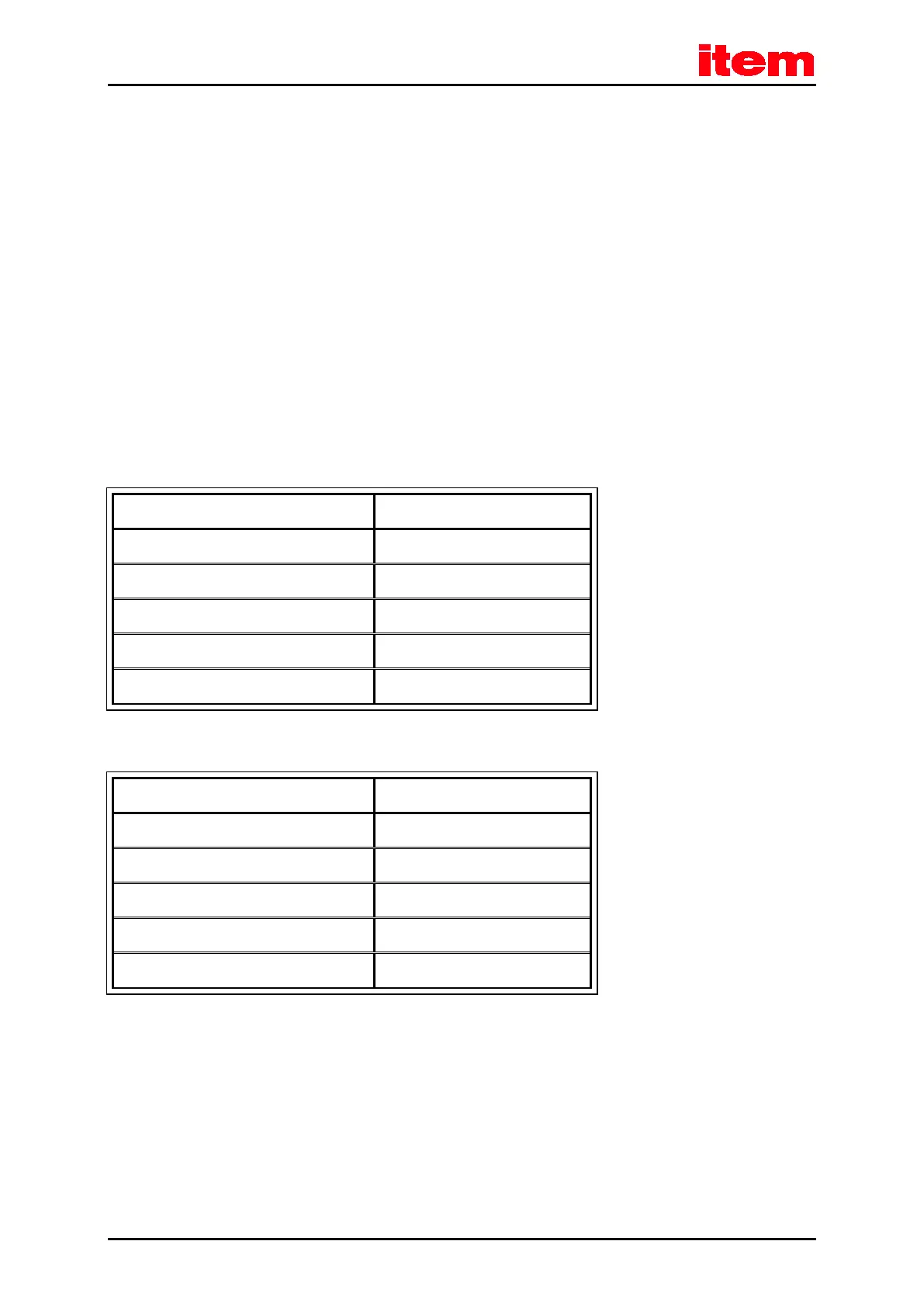
Table 19: Technical data: Resolver [X2A]
Transformation ratio 0,5
Carrier frequency 5 to 10 kHz
Excitation voltage 7 V
RMS
, short circuit-proof
Impedance excitation (at 10kHz) ≥ (20 + j20) Ω
Impedance stator ≤ (500 + j1000) Ω
Table 20: Technical data: Resolver interface [X2A]
Resolution 16 Bit
Delay time signal detection < 200 µs
Speed resolution approximately 4 min
-1
Absolute accuracy of angle detection < 5´
Max. rotational speed 16.000 min
-1
4.5.2 Encoder connection [X2B]
At the 15-pole D-Sub connection [X2B], motors with encoder can be fed back. The possible incremental encoders for the
encoder connection are divided into several groups. If you want to use other types of encoders, please contact your sales
representative.

 Loading...
Loading...