5-14
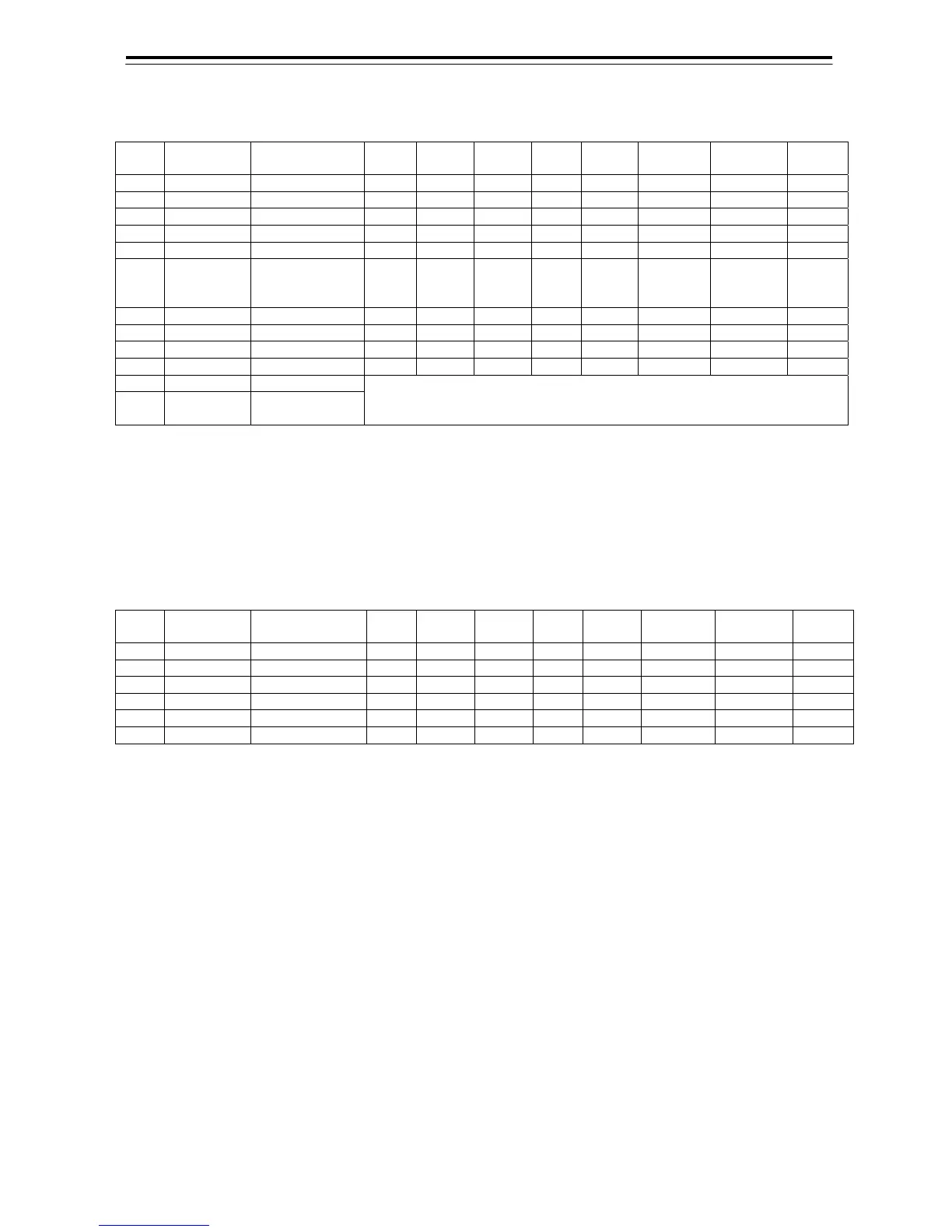
Configuration Set default list
Default setting of CQD-2121
Check Terminal
Board
Sensor Baud
rate
Data
Length
Parity Stop
bits
Buffer
Size
Time Out Cheksum CCRS
レ NSK GYRO I/F 9,600 8 EVEN 2 1024 2 レ
ARPA1 TT1 (NMEA) 4,800 8 NONE 1 4096 30 レ
ARPA2 TT2 (NMEA) 4,800 8 NONE 1 4096 30 レ
レ NAV1 GPS1 4,800 8 NONE 1 1024 15 レ
NAV2 GPS2 4,800 8 NONE 1 1024 15 レ
GYRO GYRO (NMEA)
38,400
or
4,800
8 NONE 1 1024 15 レ
レ AIS AIS 38,400 8 NONE 1 4096 15 レ
D_LOG LOG (NMEA) 4,800 8 NONE 1 1024 15 レ
DEPTH Depth 4,800 8 NONE 1 1024 15 レ
NAVTEX NAVTEX (NMEA) 4,800 8 NONE 1 4096 0 レ
A/P Auto Pilot
CONNING
OUT
Conning
Depends on the specification of connected devices.
※ : The Baud rate of GYRO depends on the specification of NMEA signal.
※ : NAV2, GYRO, D_LOG and DEPTH are valid in case of connecting with sensors.
※ : When setting of GPS1 is not NAV1, it is necessary to set sensor setting POSN1 of each application to
LAN.(see an ECDIS or RADAR mode instruction manual.)
※ : Always use Checksum by turning on because the prow azimuth data is critical data for radar.
Default setting of CQD-2128
Check Terminal
Board
Sensor Baud
rate
Data
Length
Parity Stop
bits
Buffer
Size
Time Out Cheksum CCRS
レ RADAR ALM Alarm System 4,800 8 NONE 1 1024 0 レ
レ ARPA TT (MENA) -TX 4,800 8 NONE 1 4096 30 レ
レ JAPRA JRC-TT-TX 4,800 8 NONE 1 4096 30 レ
レ RADAR MNT Remaote Mainte 4,800 8 NONE 1 1024 15 レ
--- OP1 --- --- --- --- --- --- --- --- ---
--- OP2 --- --- --- --- --- --- --- --- ---