6 — CANopen COMMUNICATIONS
pg. 49
Return to TOC Curtis Model 3401T – August 2022
Preconfigured PDOs
Several of the precongured PDOs include bytes that indicate fault codes for various devices. For
example, there are bytes for the fault codes of traction and pump controllers. e four most signicant
bits indicate a fault code’s rst digit and the four least signicant bits indicate the second digit. 0h
indicates that the device does not have an active fault.
For example, if the pump controller’s fault code is 92, the corresponding byte’s value is 92h.
e following topics describe the precongured PDOs.
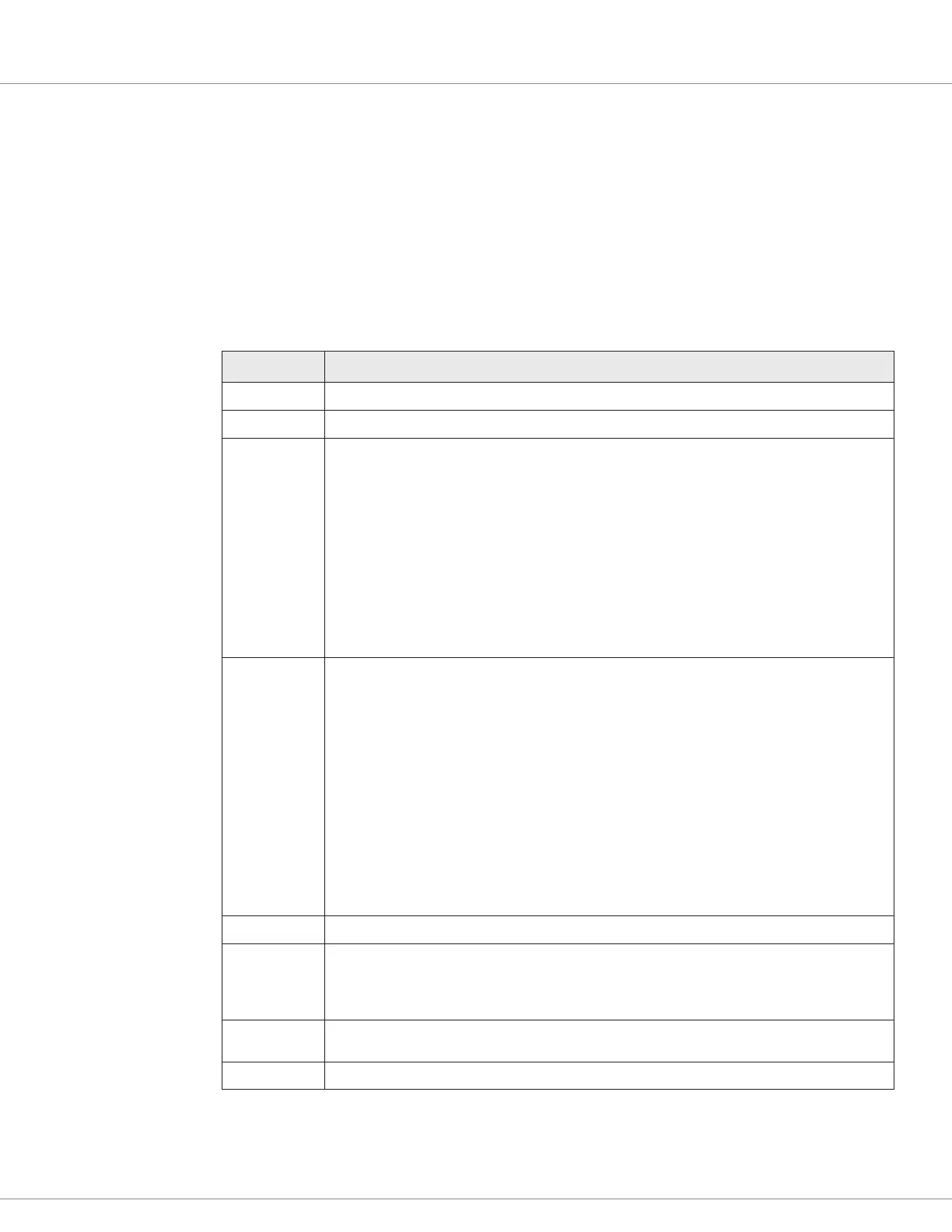
RPDO1
Byte(s) Description
0 The fault code for the right traction controller.
1 The fault code for the pump controller.
2 The following bits specify statuses and the display of hour meters. When a status is active, its
corresponding icon displays. Unless otherwise noted, 1b = active:
• 0: Parking status
• 1: Seat status (0b = active)
• 2: Seatbelt status
• 3: Traction and pump hour meters and cargo weight and lift height indicators. RPDO2, byte
0, bits 5–7 specify which combination of hour meters and indicators are displayed.
• 4: The “T” blinks on the traction hour meter.
• 5: The “P” blinks on the pump hour meter.
• 6: Safety pedal status
• 7: Guardrail status (reach trucks and order pickers screen only)
3 The following bits indicate various types of data:
• 0: Whether the right traction controller’s fault code is from pin 14 (Switch Input4/Analog
Input4/TRA Fault Code Input) or the CANbus. 0b = pin 14.
• 1: Whether the left traction controller’s fault code is from pin 14 (Switch Input4/Analog
Input4/TRA Fault Code Input) or the CANbus. 0b = pin 14.
• 2: Whether the pump controller’s fault code is from pin 6 (Switch Input3/Analog Input3/HYD
Fault Code Input) or the CANbus. 0b = pin 6.
• 3: Whether the seatbelt status is from a switch input or the CANbus. 0b = switch input.
• 4: Whether the parking status is from a switch input or the CANbus. 0b = switch input.
• 5: Whether BDI data is from the 3401T or from the CANbus. 0b = 3401T.
• 6: Whether the steering angle is displayed on the counterbalanced forklifts screen. 1b =
displayed.
• 7: Whether the seat status is from the 3401T or the CANbus. 0b = 3401T.
4 The fault code for the left traction controller.
5 The speedometer data.
Note: RPDO3, byte 5, bit 6 species how the speed is scaled. For example, suppose that this
byte species FFh. If the RPDO3 bit is 0b, the speedometer displays 25.5 km/h, otherwise it
displays 51.0 km/h.
6 The wheel angle (counterbalanced forklifts screen). The range of values is A6h–5Ah, which
represents −90° to +90°.
7 The BDI percentage. The range of values is 0–100, which represents 0–100%.
 Loading...
Loading...