106 / 127 Issued: 18.06.2015 Version: Spez KR QUANTEC extra V6
KR QUANTEC extra
6.3 Connecting cables and interfaces
Connecting
cables
The connecting cables comprise all the cables for transferring energy and sig-
nals between the robot and the robot controller. They are connected to the ro-
bot junction boxes with connectors. The set of connecting cables comprises:
Motor cable, X20 - X30
Data cable X21 - X31
Ground conductor (optional)
Depending on the specification of the robot, various connecting cables are
used. Cable lengths of 7 m, 15 m, 25 m, 35 m and 50 m are available. The
maximum length of the connecting cables must not exceed 50 m. Thus if the
robot is operated on a linear unit which has its own energy supply chain these
cables must also be taken into account.
For the connecting cables, an additional ground conductor is always required
to provide a low-resistance connection between the robot and the control cab-
inet in accordance with DIN EN 60204. The ground conductors are connected
via ring cable lugs. The threaded bolt for connecting the ground conductor is
located on the base frame of the robot.
The following points must be observed when planning and routing the con-
necting cables:
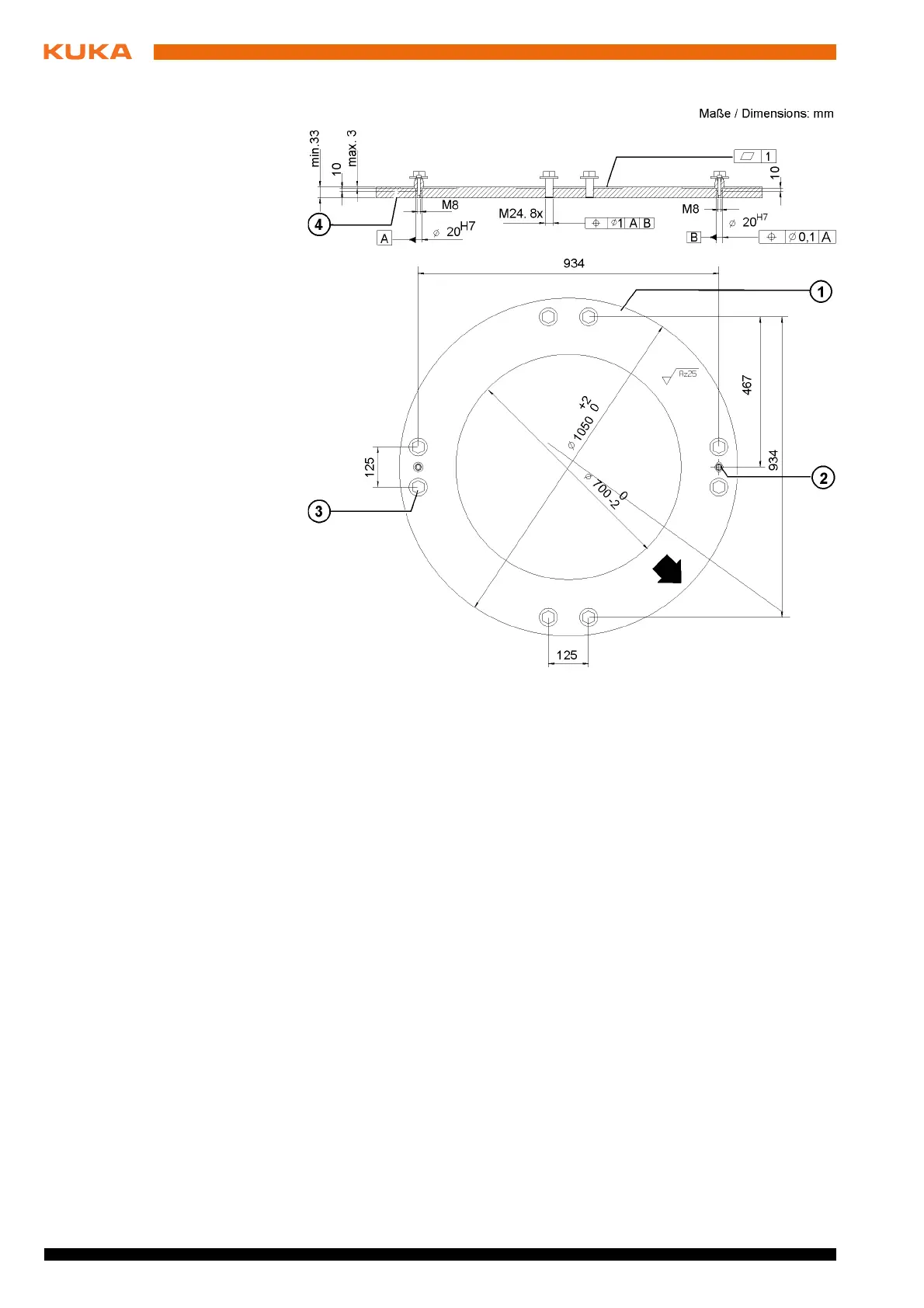
Fig. 6-5: Machine frame mounting, dimensioned drawing
1 Mounting surface 3 Hexagon bolt (8x)
2 Pin 4 Steel structure