42 / 127 Issued: 18.06.2015 Version: Spez KR QUANTEC extra V6
KR QUANTEC extra
according to IEC 60204-1
The values specified for Stop 0 are guide values determined by means of
tests and simulation. They are average values which conform to the re-
quirements of DIN EN ISO 10218-1. The actual stopping distances and
stopping times may differ due to internal and external influences on the
braking torque. It is therefore advisable to determine the exact stopping
distances and stopping times where necessary under the real conditions
of the actual robot application.
Measuring technique
The stopping distances were measured using the robot-internal measur-
ing technique.
The wear on the brakes varies depending on the operating mode, robot
application and the number of STOP 0 triggered. It is therefore advisable
to check the stopping distance at least once a year.
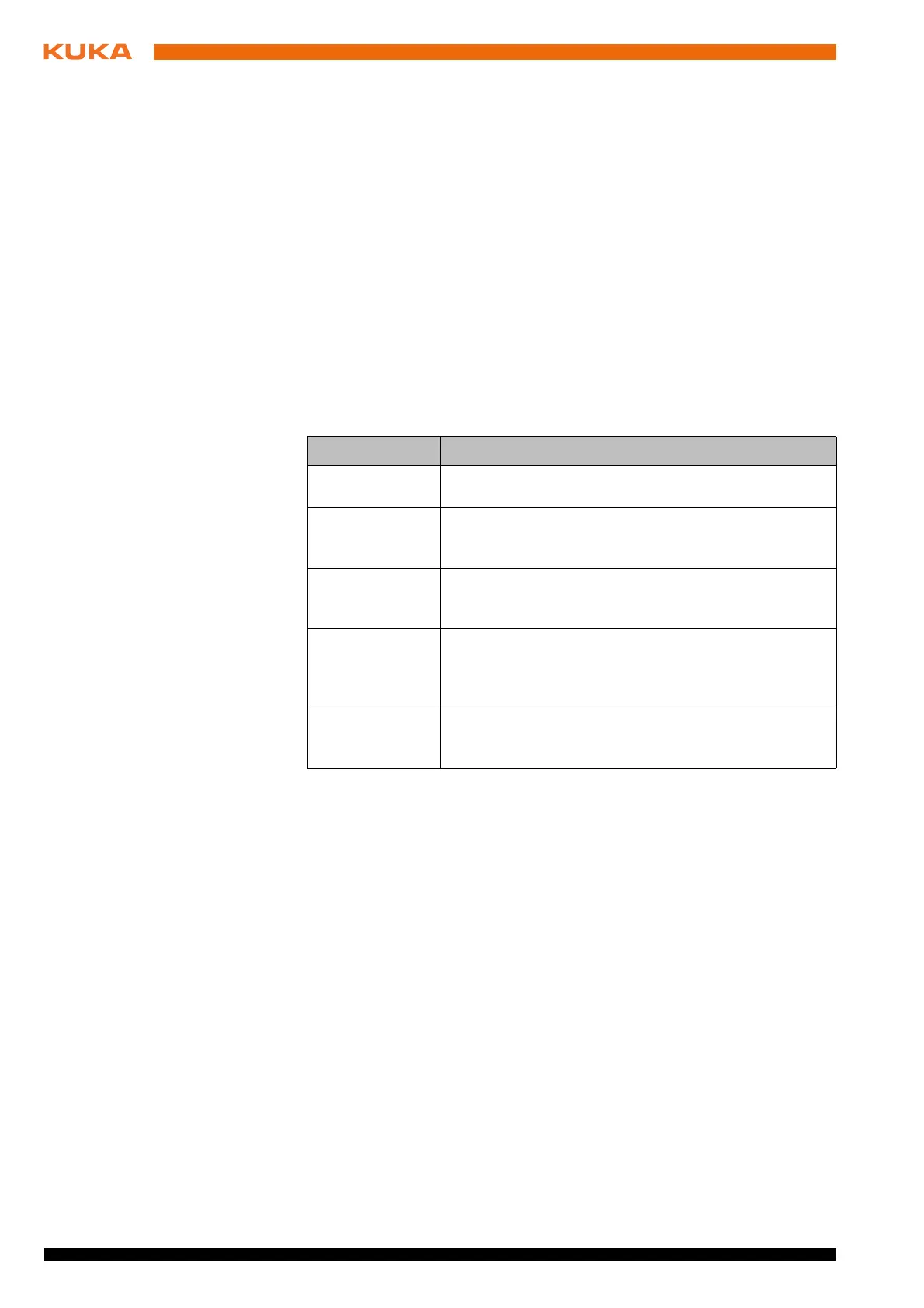
4.7.2 Terms used
Term Description
m Mass of the rated load and the supplementary load on
the arm.
Phi Angle of rotation (°) about the corresponding axis. This
value can be entered in the controller via the KCP and
is displayed on the KCP.
POV Program override (%) = velocity of the robot motion.
This value can be entered in the controller via the KCP
and is displayed on the KCP.
Extension Distance (l in %) (>>> Fig. 4-22 ) between axis 1 and
the intersection of axes 4 and 5. With parallelogram
robots, the distance between axis 1 and the intersec-
tion of axis 6 and the mounting flange.
KCP The KCP teach pendant has all the operator control
and display functions required for operating and pro-
gramming the robot system.