ELD2-RS70** User Manual
4.2.2
【
Class 1
】
Gain Adjust
Set regenerated discharge resistance value
Regenerative discharge resistance
power
Set regenerative discharge resistance power
1st gain of position loop
You can determine the response of the positional control system. Higher the gain of position loop you
set, faster the positioning time you can obtain. Note that too high setup may cause oscillation.
1st gain of velocity loop
You can determine the response of the velocity loop. In order to increase the response of overall
servo system by setting high position loop gain, you need higher setup of this velocity loop gain as
well. However, too high setup may cause oscillation.
1st Time Constant of Velocity Loop
Integration
You can set up the integration time constant of velocity loop, Smaller the set up, faster you can
dog-in deviation at stall to 0.The integration will be maintained by setting to”9999”.The integration
effect will be lost by setting to”10000”.
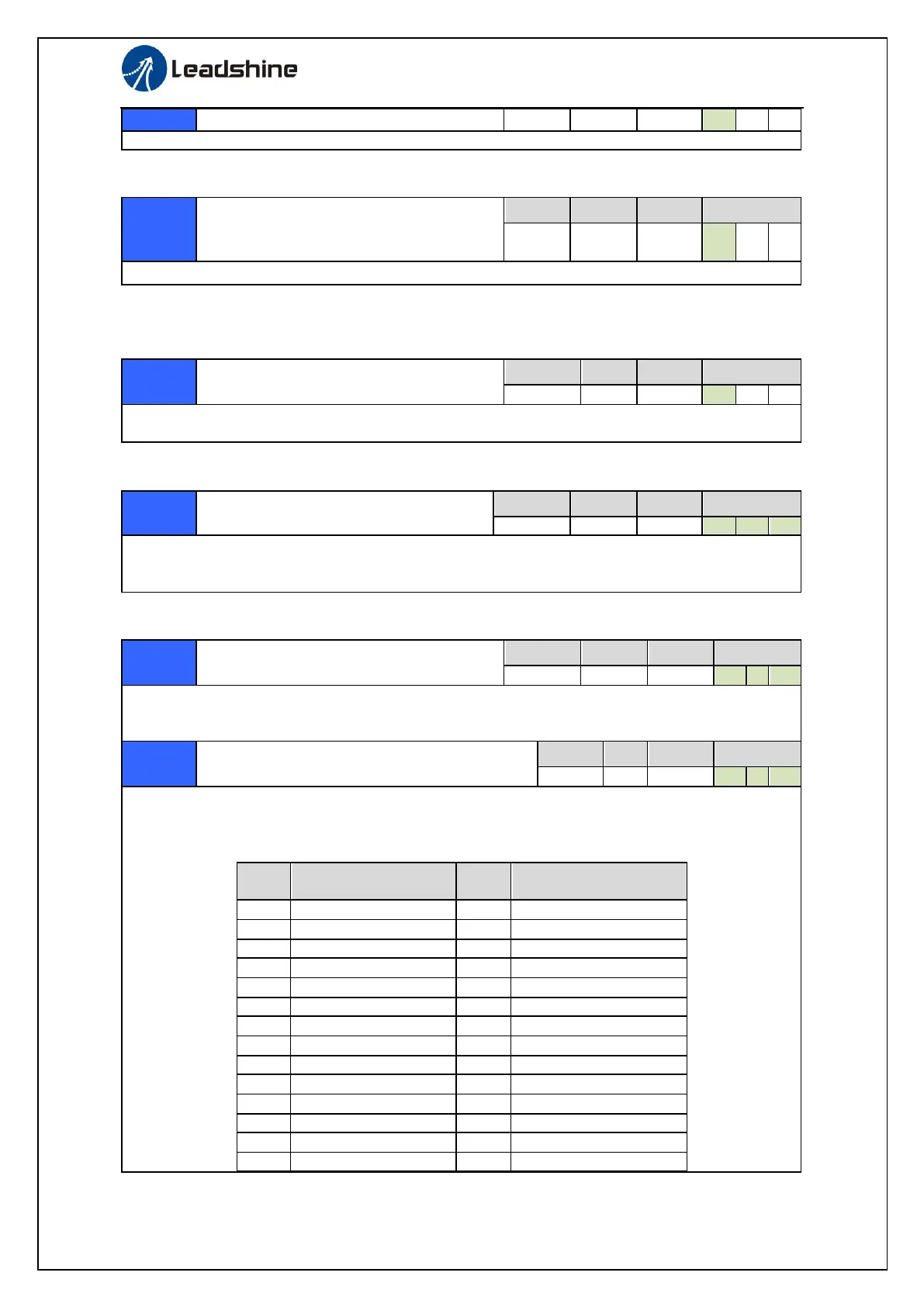
1st Filter of Velocity Detection
You can set up the time constant of the low pass filter (LPF) after the speed detection, in 32 steps
(0 to 31).Higher the setup, larger the time constant you can obtain so that you can decrease the motor
noise, however, response becomes slow.
You can set the filter parameters through the loop gain, referring to the following table:
Speed Detection Filter
Cut-off Frequency(Hz)
Speed Detection Filter
Cut-off Frequency(Hz)
 Loading...
Loading...