Set the command pulse that causes single turn of the motor shaft.
When this setting is 0 ,Pr009 1
st
numerator of electronic gear and Pr0.10 Denominator of electronic
Gear become valid.
1st numerator of electronic gear
Set the numerator of division/multiplication operation made according to the command pulse input.
denominator of electronic gear
Set the denominator of division/multiplication operation made according to the command pulse
input.
Command division/multiplication operation
【Pr0.09 set value】
【Pr0.10 set value】
position command
Command pulse input
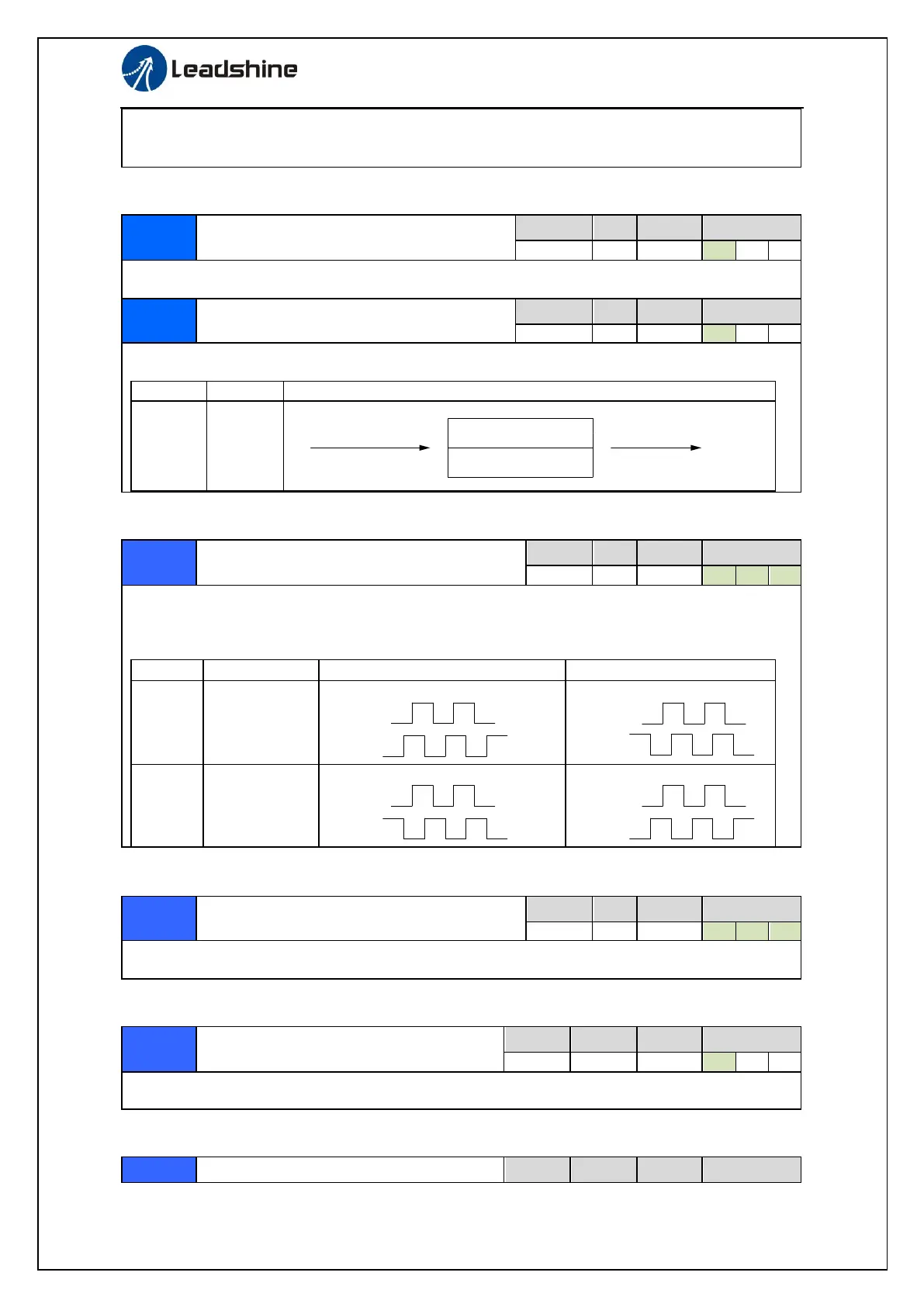
Reversal of pulse output logic
You can set up the B phase logic and the output source of the pulse output. With this parameter, you
can reverse the phase relation between the A-phase pulse and B-phase pulse by reversing the B-phase
logic.
< reversal of pulse output logic >
You can set up the limit value of the motor output torque, as motor rate current %, the value can’t
exceed the maximum of output current.
Position Deviation Excess Setup
Set excess range of positional deviation by the command unit(default).Setting the value too small
will cause Err18.0 (position deviation excess detection)
Regenerated discharge resistance
 Loading...
Loading...