ELD2-RS70** User Manual
6.3 Automatic Control Mode Run
6.3.1 Operation Mode Selection
ELD2 series Low-voltage AC servo drives support the position, speed, torque three basic modes of
operation, and can switch freely between the three basic modes of operation by switch or modify
parameters.
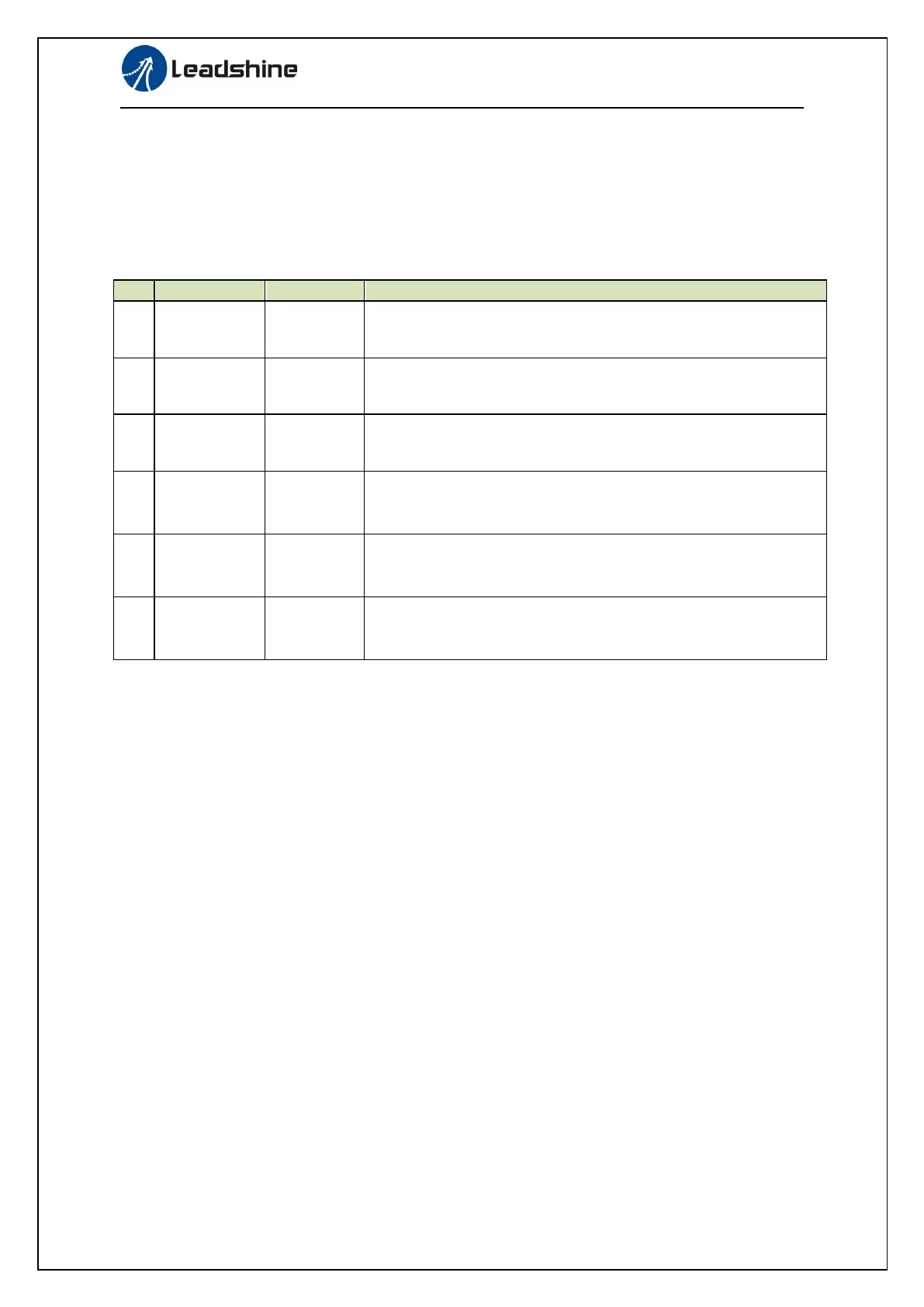
Table 7.7 Parameter setup of Operation Mode Selection
The position control is performed based on the positional command
(pulse train) from the host controller or the command set in the
servo driver.
The velocity control is performed according to the analog speed
command from the host controller or the speed command set in the
servo driver.
The torque control is performed according to the torque command
specified in the form of analog voltage or the command set in the
servo driver.
1st mode:
position mode
2nd mode:
speed mode
The control mode is switched through external input.
1st mode:
position mode
2nd Mode:
torque mode
The control mode is switched through external input.
1st mode:
speed mode
2nd Mode:
torque mode
The control mode is switched through external input.
The step of changing the operation mode:
1, Switch the driver to Servo Off status.
2, Modify the corresponding parameters of control mode to EEPROM.
Turn off/on the power to make the new mode works after setup completed.
6.3.2 Position Mode
The driver is widely used for precise positioning in position control mode.

 Loading...
Loading...