ELD2-RS70** User Manual
7.2 Parameter
PR parameters contain 8th and 9th parameters, 8th parameters is e-stop and control parameters, 9th
parameters is store path table.
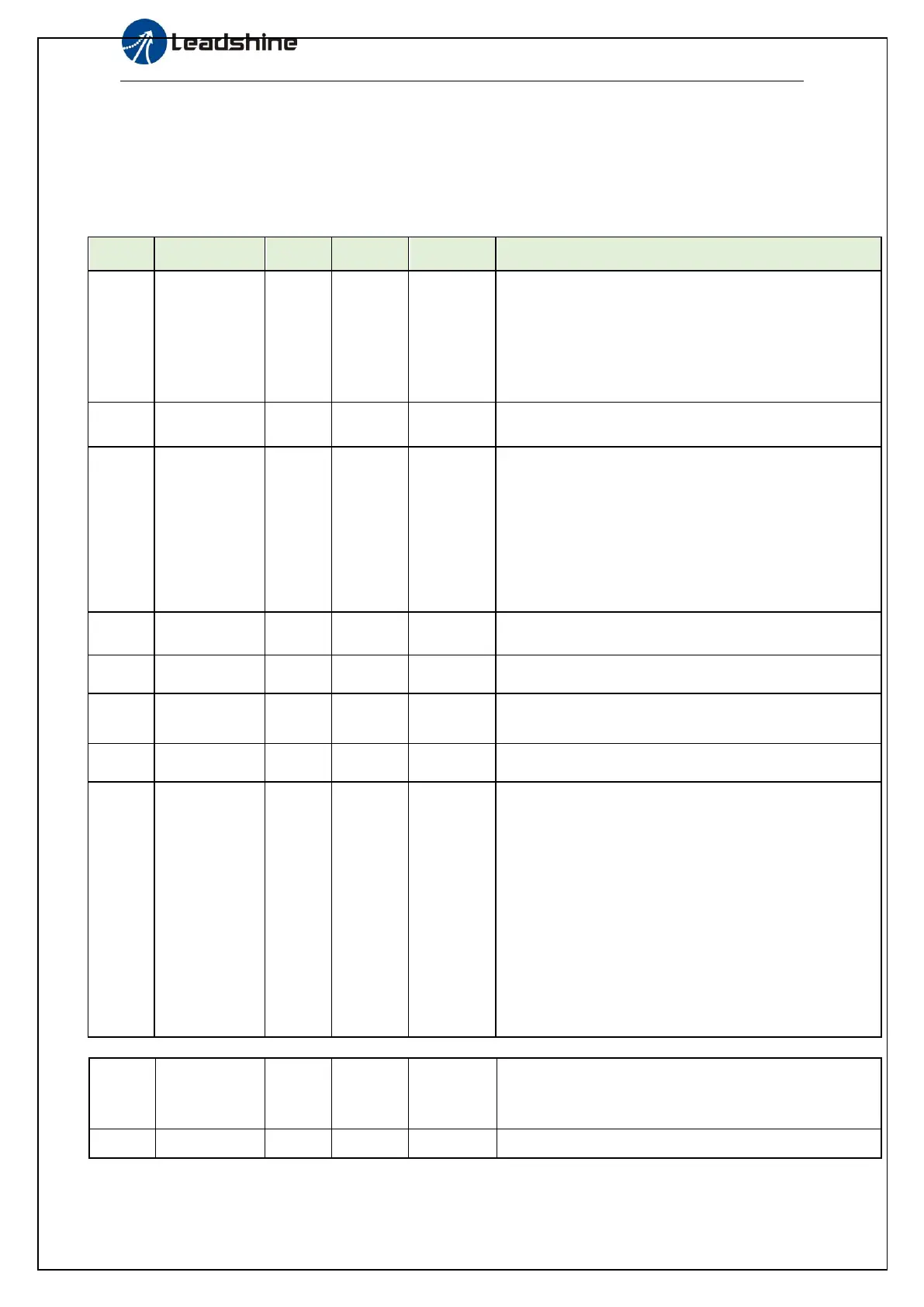
7.2.1 8th sort parameters specification
Pr-Mode control function
Bit0:=0, CTRG rising edge trigger
=1, double edge trigger,
Bit1:Software limit effectively,0 invalid /1 valid
Bit2:Homing after power on ,0 invalid /1 valid
Bit3:Absolute position,0 invalid /1 valid
Write 0x1P,P section locate 16-31
Write 0x21,set current position as zero point
Write 0x40,e-stop
Read 0x00P,indicate positioning finished, can receive new data
Read 0x20P,In positioning
Positive software
limit H
Positive software limit, high 16 bit, during homing,software limit
invalid.
Positive software
limit L
Positive software limit, low 16 bit.
Negative
software limit H
Negative software limit, high 16 bit, The precision of software
limit is 0.1 round
Negative
software limit L
Negative software limit, low 16 bit
Homing Method,
Bit0:homing direction, 0 reverse/1 forward
Bit1:Whether go to the set point after homing, 0 No /1 Yes
Bit2-7:Homing mode
=0:homing with limit switch detect
=1:homing with homing switch detect
=2:homing with single turn Z signal detect
=3:homing with torque detect
=8:set current position as homing point
Bit8:
=0:homing process without Z signal detect
=1:homing process with Z signal detect
Zero signal on coordinate axis.
Such as take positive limit as homing signal but take negative limit
as absolute position 0, then zero position is the distance between
positive/negative limit.