User Manual for ELD2 Servo
www.leadshine.com
PR 's global control function
Bit0:CTRG Rising edge trigger / Double edge
trigger,0/1
Bit1: software limit is valid,0 invalid/1 valid
Bit2:homing after power on,0 invalid/1 valid
Homing Method,
Bit0:homing direction, 0 reverse/1 forward
Bit1:Whether go to the set point after homing, 0 No /1 Yes
Bit2-7:Homing mode
=0:homing with limit switch detect
=1:homing with homing switch detect
=2:homing with single turn Z signal detect
=3:homing with torque detect
=8:set current position as homing point
Bit8:
=0:homing process without Z signal detect
=1:homing process with Z signal detect
Zero point position on the coordinate axes
Pr8.11 for high 16bit,Pr8.12 for low 16bit.
Motor move to the specified location and stop after homing. If
homing mode bit1 enable, then move to the absolute position after
homing.
P813 for high 16bit,P814 for low 16bit.
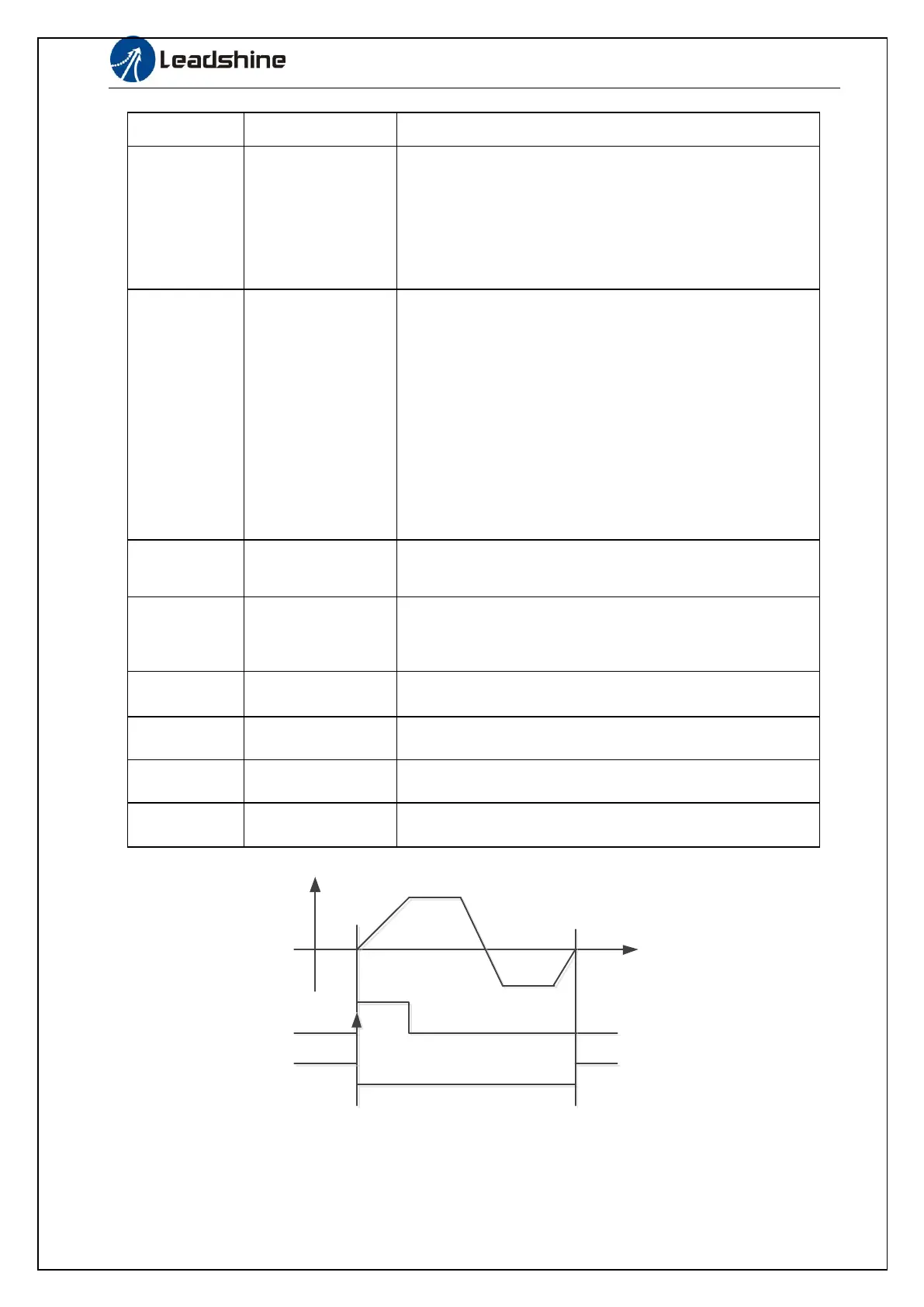
First speed of homing, unit: rpm.
Second speed of homing, unit: rpm.
Homing acceleration, unit: ms/1000rpm
Homing deceleration, unit: ms/1000rpm
Homing
Speed
HOME
CMD_OK
Start Homing
Homing finished
Remark
:
Homing also be done by positioning function, only need to set the path to be homing mode.