35
UserManualforELD2Servo
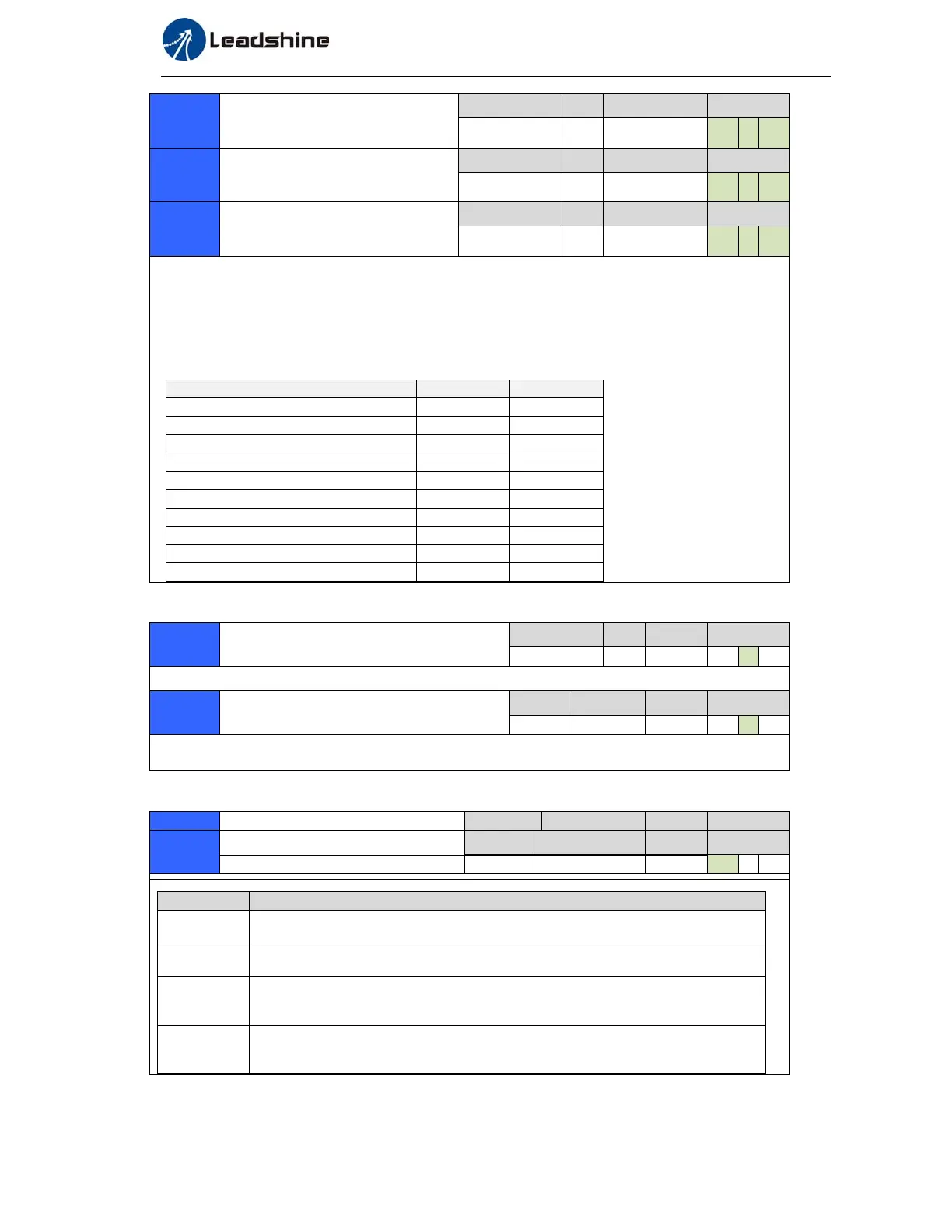
Pr4.11*
OutputselectionDO2
Range unit default
Related
control mode
0‐00FFFFFFh
‐
00020202h
(131586)
P S T
Pr4.12*
OutputselectionDO3
Range unit default
Related
control mode
0‐00FFFFFFh
‐
00000704h
(65793)
P S T
Pr4.13*
OutputselectionDO4
Range unit default
Related
control mode
0‐00FFFFFFh
‐
00000303h
(328964)
P S T
Assign functions to SO1 outputs.
This parameter use 16 binary system do setup, as following :
00- - - - * * h: position control
00- - * * - - h: velocity control
00* * - - - - h: torque control
Please at [**] partition set up function number.
For the function number, please refer to the following Figure.
Signal name symbol Setup value
Invalid - 00h
Alarm output Al
01h
Servo-Ready output S-RDY 02h
Eternal brake release signal BRK-OFF 03h
Positioning complete output INP 04h
At-speed output AT-SPPED 05h
Zero-speed detection output ZSP 07h
Velocity coincidence output
-COIN 08h
Positional command ON/OFF output P-CMD 0Bh
Speed command ON/OFF output V-CMD 0Fh
Pr4.22
Analoginput1(AI1)offsetsetup
Range unit default
Related
control mode
-5578 -5578
-
0 S
Set up the offset correction value applied to the voltage fed to the analog input 1.
Pr4.23
Analoginput1(AI1)filter
Range unit default
Related
control mode
0-6400
0.01ms
0 S
Set up the time constant of 1st delay filter that determines the lag time behind the voltage applied to
the analog input 1.
Pr4.31
Positioningcompleterange
Range unit default
Related
control mode
0 -10000
Encoder unit
10 P
Set up the timing of positional deviation at which the positioning complete signal (INP1) is output.
Pr4.32
Positioningcompleterange
Range unit default
Related
control mode
0 -3
command unit
10 P
Select the condition to output the positioning complete signal (INP1).
Setup value Action of positioning complete signal
0
The signal will turn on when the positional deviation is smaller than Pr4.31
[
ositionin
co
lete ran
e].
1
The signal will turn on when there is no position command and position
deviation is smaller than Pr4.31 [
ositionin
com
lete ran
e].
2
The signal will turn on when there is no position command, the zero-speed
detection signal is ON and the positional deviation is smaller than Pr4.31
[
ositionin
com
lete ran
e].
3
The signal will turn on when there is no position command and the positional
deviation is smaller than Pr4.31 [positioning complete range].Then holds “ON”
states until the next
osition command is entered. Subse
uentl
, ON state is