249
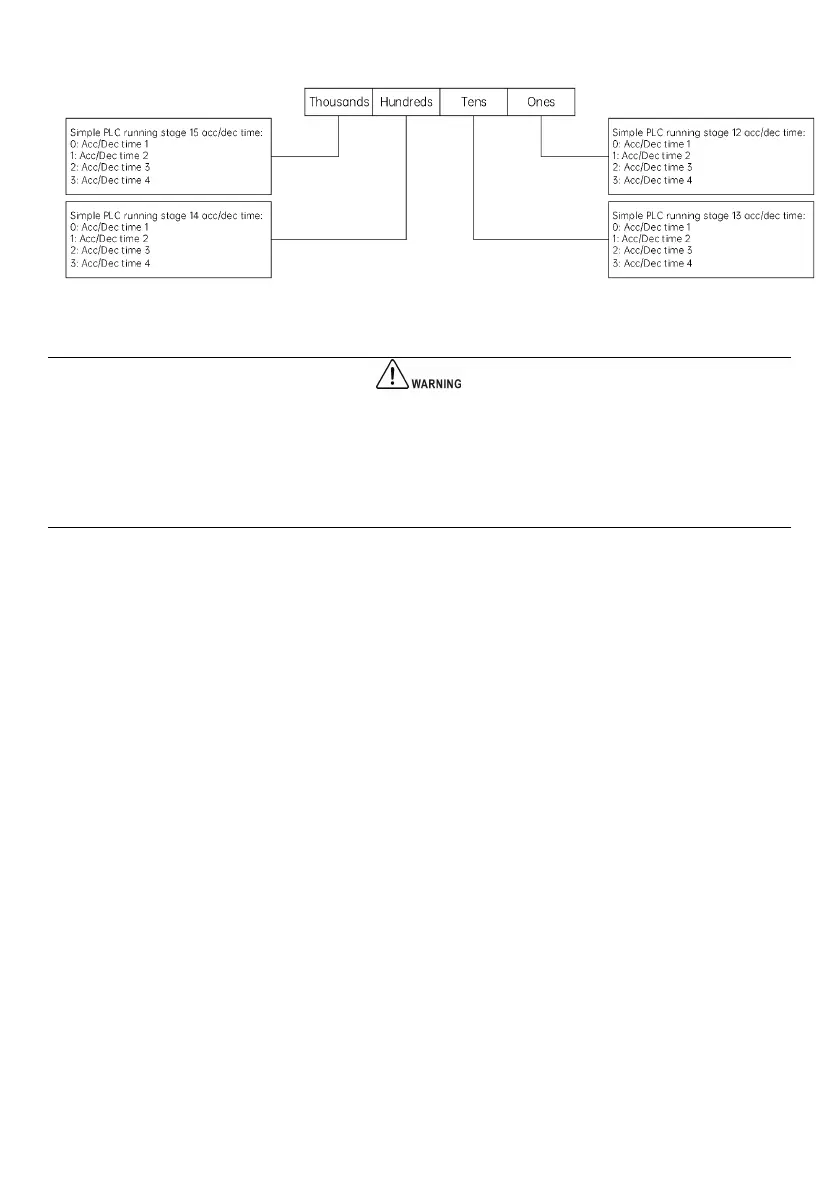
Fig. 7-43 Acceleration/Deceleration time selection of simple PLC reference 12 to 15
When the running direction of the PLC stage is determined by the running command, the motor running direction can be
changed in real time by the external direction command. For example, you can use the DI terminal to realize forward
and reverse running. The running direction is the direction determined by the running command; if the direction cannot
be determined, the direction of last stage will be followed.
7.15 P14: Process PID parameters
The PID closed-loop control adopts the combination of proportional control (P), integral control (I) and derivative control
(D) to make the feedback value consistent with the target value.
Proportional control (P)
It defines the adjustment intensity in proportion to the deviation. Solely using P control can not eliminate the
steady-state error.
Integral control (I)
It defines the adjustment intensity in proportion to the deviation integral value, which can eliminate the steady-state
error, but cannot control sharp change.
Derivative control (D)
It defines the adjustment intensity in proportion to the deviation change rate, which can predict the tendency of
deviation, quickly respond to sharp change and improve dynamic performance. It is vulnerable to interference, so use D
control only when necessary. The PID control diagram is shown in Fig. 7-44.