Page 62
5.3.5 Homing
Every positioning control requires a defined zero at start-up, which is determined by means of a
homing. The ARS 2100 SE series servo drives can do this homing on their own. As reference signals it
evaluates different inputs, for example the limit switch inputs.
A homing can be started by means of a command via the communication interface or automatically
with the servo drive enabling. Optionally a start via a digital input can be programmed using the
parameterisation program Metronix ServoCommander
®
, to carry out a specific homing independent of
the servo drive enabling. The servo drive enabling acknowledges (with falling edge) for example error
messages and can be switched off depending on the application, without requiring another homing
with a new enabling. Since the existing digital inputs are used in standard applications, the use of the
analogue inputs AIN 1, AIN 2 as digital inputs DIN AIN 1 and DIN AIN 2 as well as the digital outputs
DOUT 2 and DOUT 3 as digital inputs DIN 10 and DIN 11 are optionally available.
Several methods as per the CANopen manual and following DSP 402 are implemented for the
homing. Most methods first search for a switch at search velocity. The further movement depends on
the method of communication. If a homing is activated via the fieldbus, there is generally no following
positioning to zero. This is done optionally during the start via the servo drive enabling. A following
positioning is always an option. The default setting is “no following positioning”.
Ramps and velocities are parameterisable for the homing. The homing can also be time-optimal and
jerk-limited.
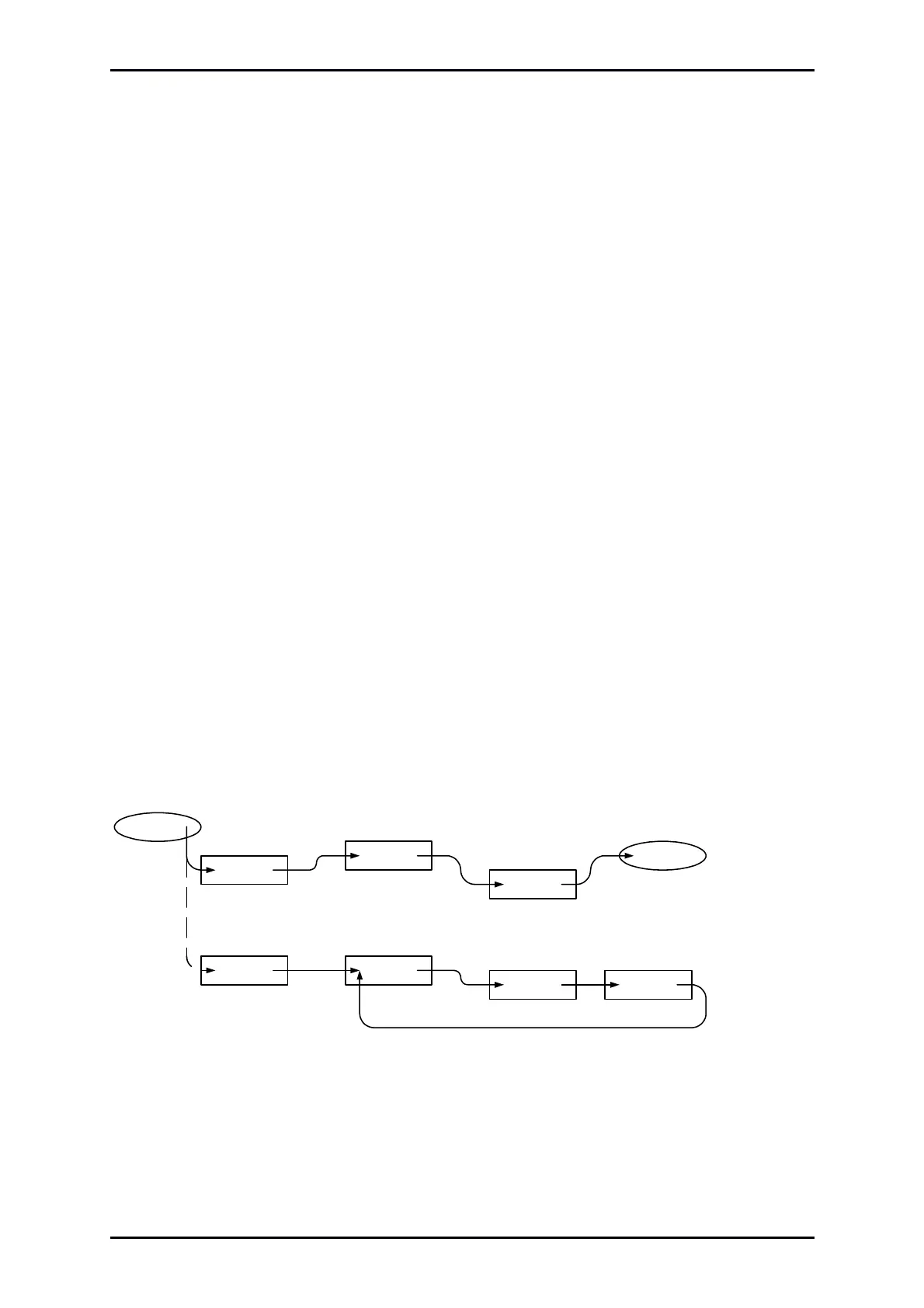
5.3.6 Positioning sequences (path program)
Positioning sequences consist of a series of positioning sets. These are run consecutively. A
positioning set can be made part of a path program by means of its path program options, thus
generating a linked list of positions:
 Loading...
Loading...

