Page 85
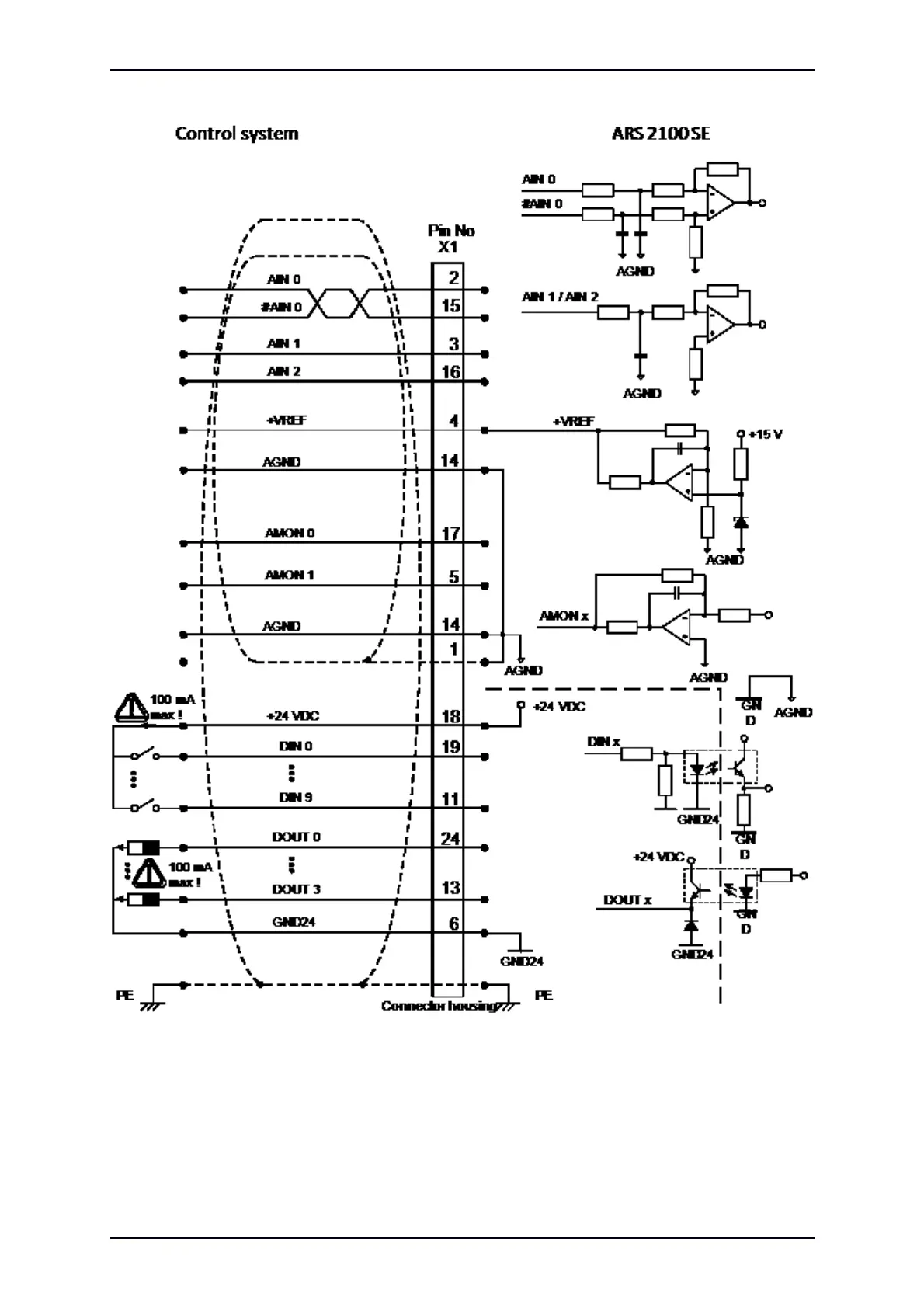
Figure 17: Basic circuit diagram connector [X1]
The servo drive ARS 2100 SE comprises one differential (AIN 0) and two single-ended analogue
inputs, designed for input voltages within a range of 10V. The inputs AIN 0 and #AIN 0 are lead to the
control via twisted cables (twisted pair design).
Product Manual „Servo drives ARS 2100 SE“ Version 5.0
 Loading...
Loading...


