Page 93
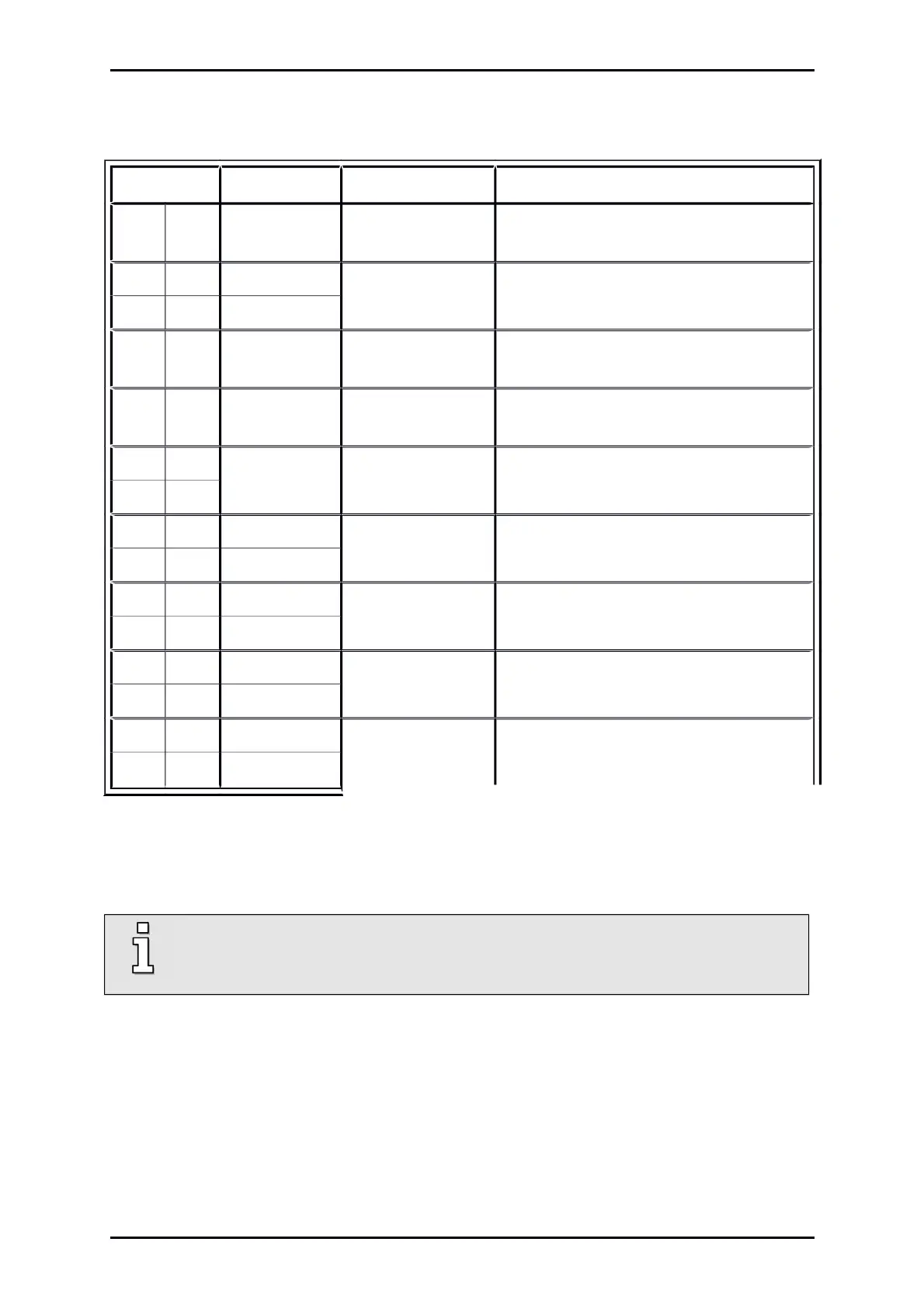
Table 36: Pin assignment: Incremental encoder with serial interface (for example EnDat,
HIPERFACE
®
) [X2B]
Pin No Denomination Values Specification
1 MT+
+3,3V / Ri = 2 k
Motor temperature sensor
1)
, normally closed
contact, PTC, KTY
9 U_SENS+ 5 V ... 12 V
R
I
1 k
Sensor cables for encoder supply
2 U_SENS-
10 US
5 V / 12 V / 10 %
I
max
= 300 mA
Supply voltages for high-resolution
incremental encoder
3 GND 0 V Reference potential encoder supply and
motor temperature sensor
11
4
12 DATA 5 V
SS
R
I
120
Bidirectional RS485 data line (differential)
(EnDat/HIPERFACE
®
)
5 #DATA
13 SCLK 5 V
SS
R
I
120
Clock output RS485 (differential)
(EnDat)
6 #SCLK
14 COS_Z0
2)
1 V
SS
/ 10 %
R
I
120
COSINE trace signal (differential) from high-
resolution incremental encoder
7 #COS_Z0
2)
15 SIN_Z0
2)
1 V
SS
/ 10 %
R
I
120
SINE trace signal (differential) from high-
resolution incremental encoder
8 #SIN_Z0
2)
1)
Please comply with Chapter 9 Additional requirements for the servo drives concerning the UL approval on
page 113.
2)
Heidenhain encoder: ASIN_Z0; BCOS_Z0
In addition, a low-impedance connection of the outer cable shield to the housing of the
servo drive has to be established. Therefore, the outer cable shield of the angle
encoder cable must be connected to the housing of the angle encoder connector.
Product Manual „Servo drives ARS 2100 SE“ Version 5.0
 Loading...
Loading...


