Manual Corvus-eco
Starting up 20
Commands to adapt the controller to different motor types
To adapt the motor driver to the motors the following
Venus-1 commands are provided:
More informations see in the Venus-1 manual.
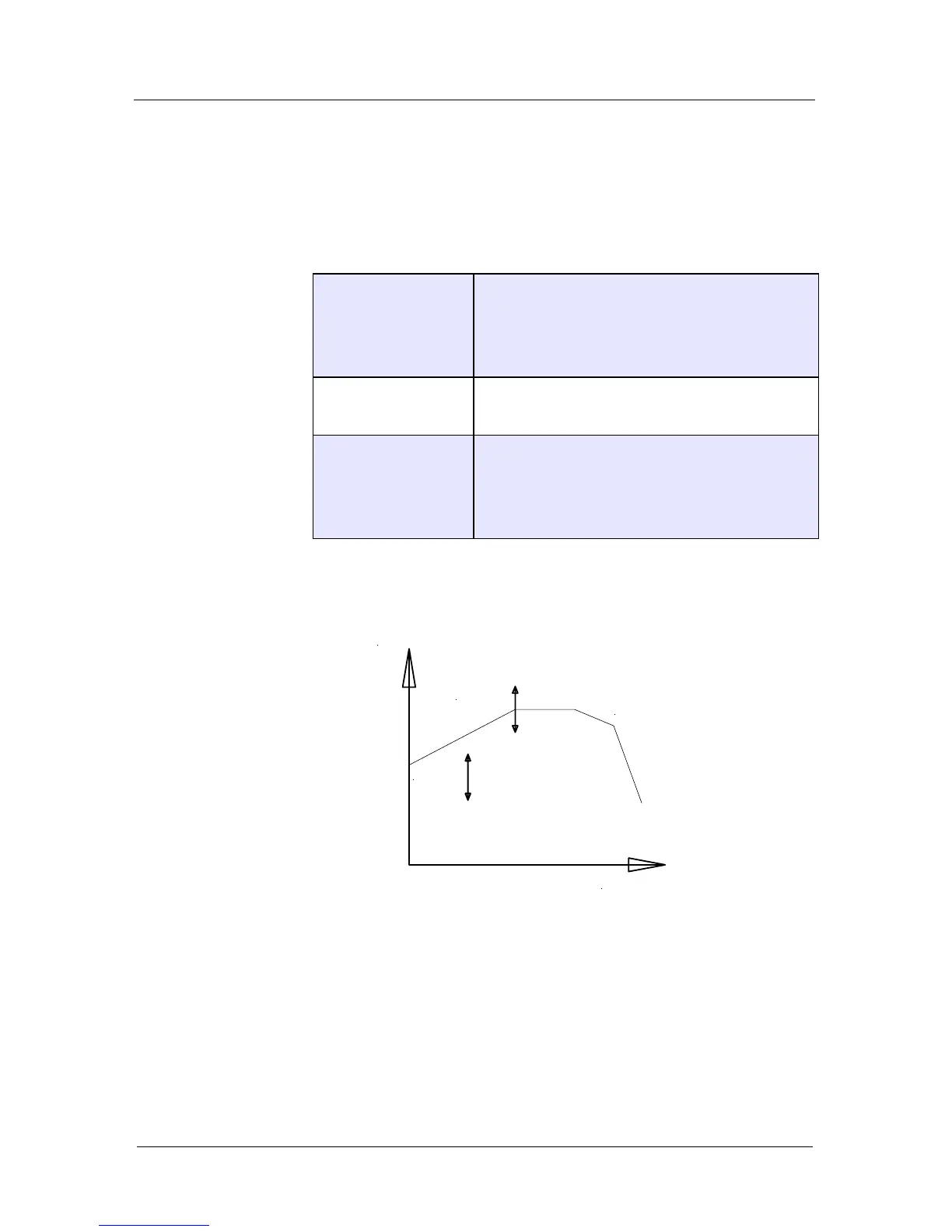
Above diagram describe the typical stepper motor behavior.
The motor torque depends in the BEMF (back-el
ectromotive-
force) area on the revolutions / torque characteristic of the
motor.
At lower and medium step rates the settings of umotmin and
umotgrad are dominant for the motor characteristic.
setumotmin
Determines the phase current if the
motor stand-still.
This affects the holding torque and pow-
er consumption at the motors.
setumotgrad
Determines the phase current and
moving torque if the motor is moving.
setpolepairs
Adapts controller to polepairs of the
different motor types.
0.9° Hybridmotor polepairs = 100
1.8° Hybridmotor polepairs = 50
revolution / s
Phase current
umotmin
umotgrad
BEMF area