Manual Corvus-eco
Functions 47
Motion control functions
Linear interpolation
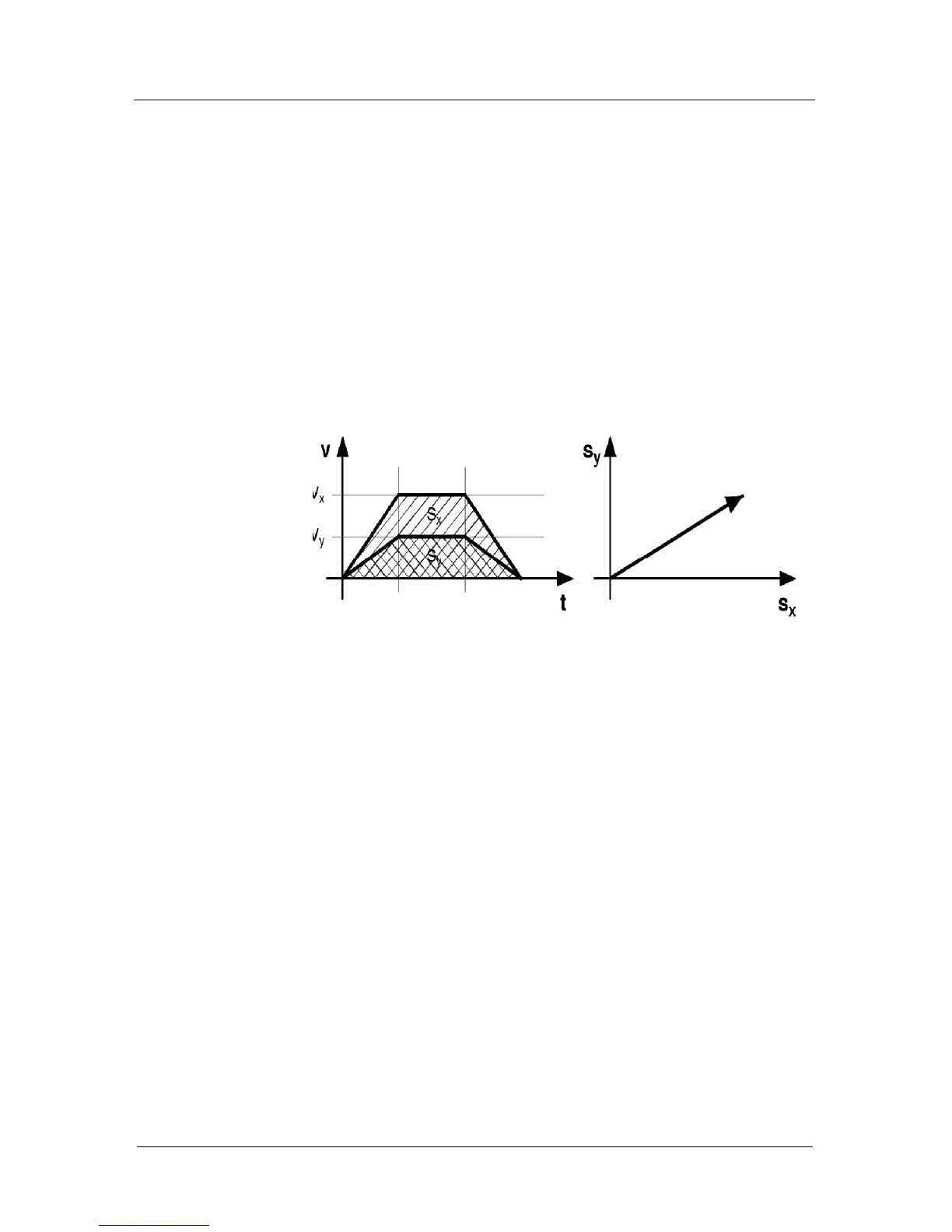
In the programmed positioning mode the axes are linear inter-
polated and a so-called vector move is executed.
In doing so, the involved axes are synchronized that
way that
the time of acceleration and the time of deceleration are
equal.
A cross table with the axes x and y
executes thereby a
straight movement.
Velocity and acceleration
The settings of the velocity and the acceleration always refers
to the axis with the longest moving distance. It is also called
the limiting axis.
The velocity of the other axes v
is a result of the ratio of the
moving distance of these axes to the moving distance of the
limiting axis s
lim
The acceleration of the other axes is a result of their maxi-
mum velocities.
v
s
s
lim
--------- v
lim
Þ=