5. Product presentation
MiR100 User guide (en) 09/2019 - v.1.4 ©Copyright 2019: Mobile Industrial Robots A/S. 41
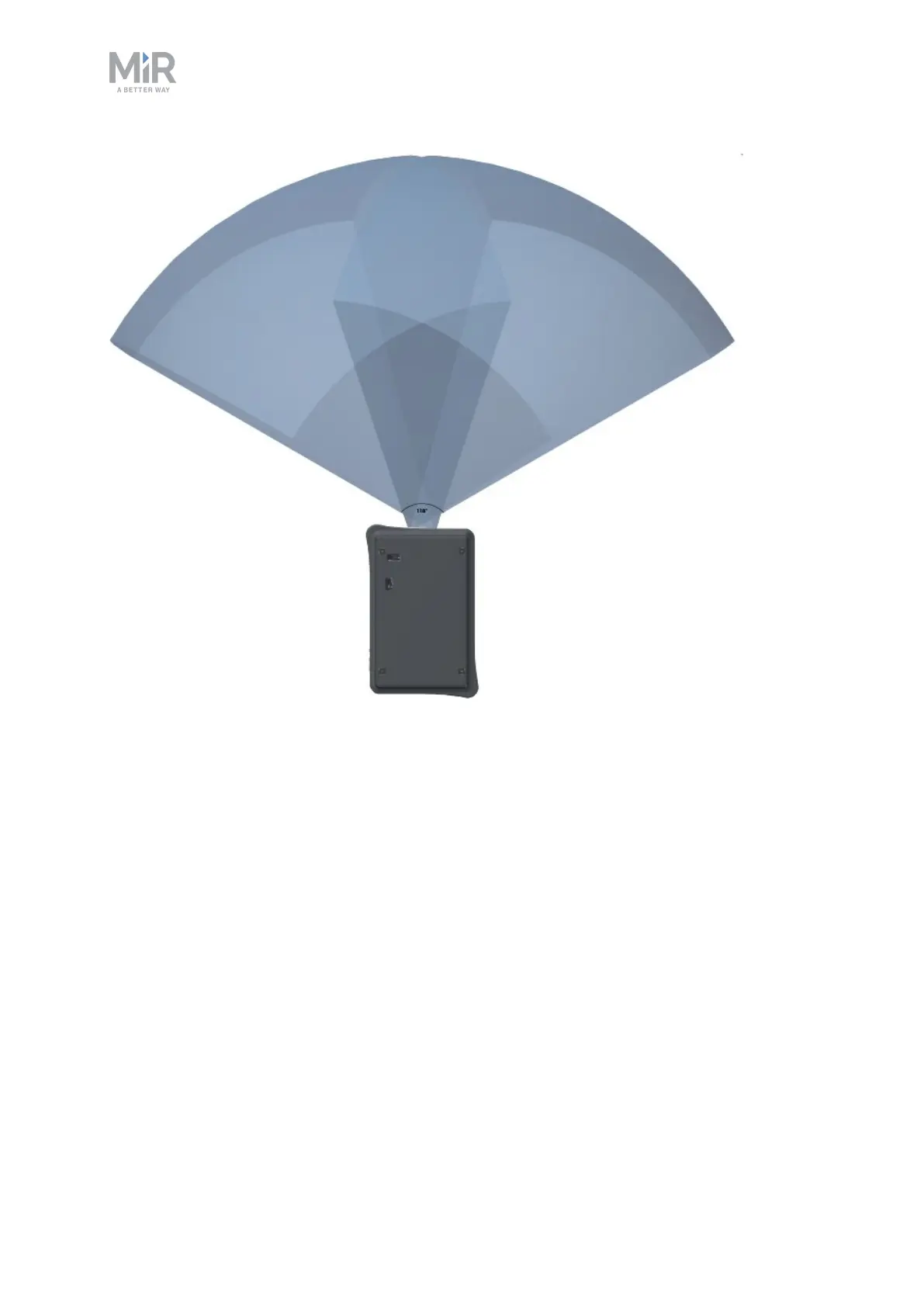
The two 3D cameras have a horizontal field of view of 118°.
Ultrasound sensors
Four ultrasound sensors are placed on the robot: two at the front and two at the rear of the
robot. The ultrasound sensors are used to detect transparent objects.
Internal sensors
The internal sensor system of the robot consists of the following components:
• Gyroscope (IMU)
Measures the orientation and angular velocity of the robot.
• Motor encoder
Provides closed loop feedback signals by tracking the speed and/or position of the motor
shaft.
• Accelerometer
Measures non-gravitational acceleration.