109
The sampling process in the inertial measurement unit is synchronised to GPS time so
the 100 Hz or 250 Hz measurements from the RT are synchronised to GPS.
The navigation computer is a Pentium class processor that runs the navigation algorithms
(more on this below). Information from the DSP and the two GNSS receivers is fed into
the navigation computer. The navigation computer runs a real-time operating system
(QNX) so outputs are made in a deterministic amount of time. The outputs from the
navigation computer are available over Serial RS232, UDP broadcast on Ethernet or
CAN bus.
On RT3000 and RT4000, and some RT2000 products differential corrections can be
supplied directly to the GNSS receiver to improve the positioning accuracy. The
differential corrections can be supplied via radio modem from a base station, via cell
phone from a base station or from a separate differential source, such as TerraStar or US
Coastguard.
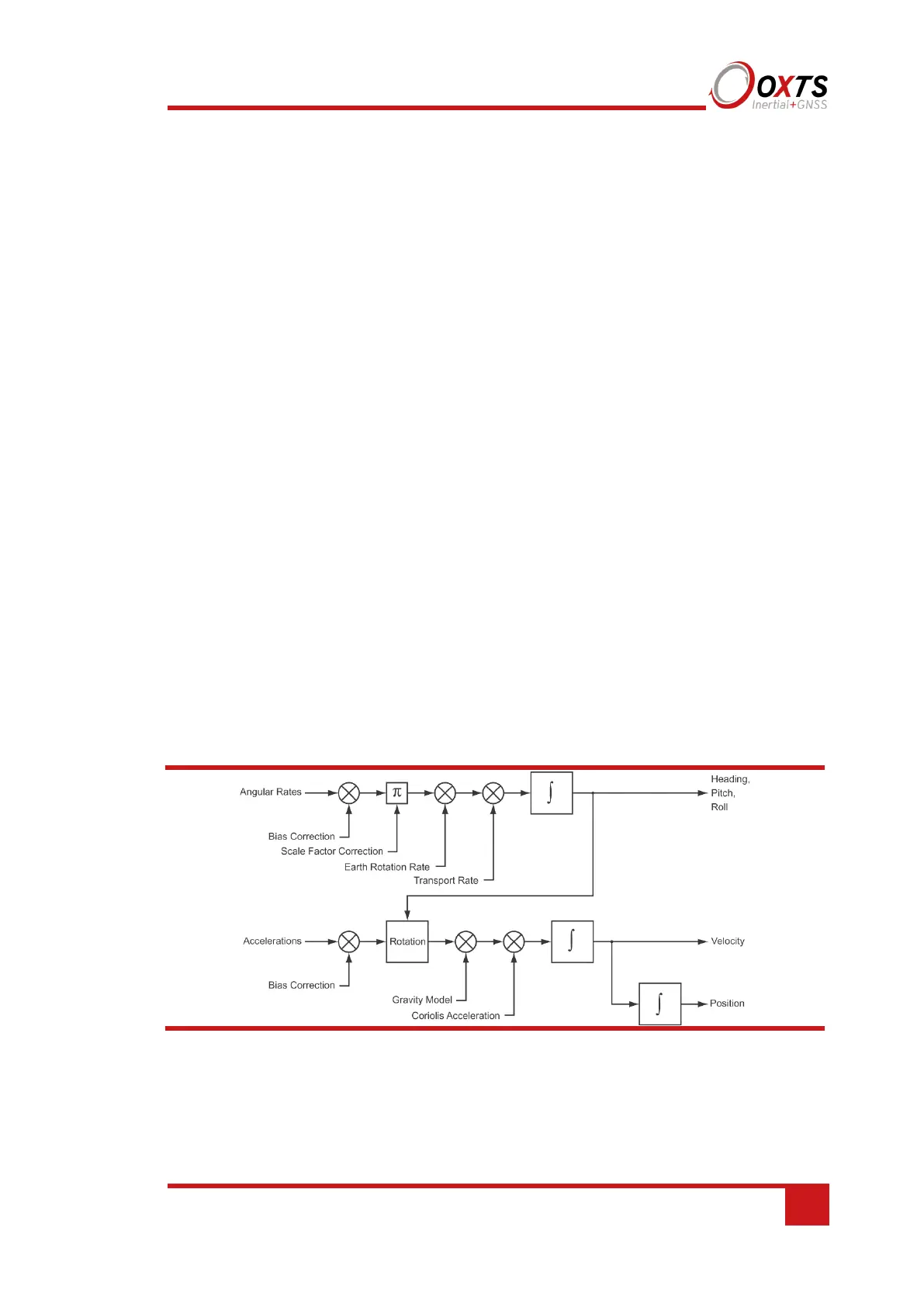
Strapdown navigator
The outputs of the system are derived directly from the strapdown navigator. The role of
the strapdown navigator is to convert the measurements from the accelerometers and
angular rate sensors to position. Velocity and orientation are also tracked and output by
the strapdown navigator.
Figure 50 shows a basic overview of the strapdown navigator. Much of the detail has
been left out and only the key elements are shown here.
Figure 50. Schematic of the strapdown navigator
People familiar with inertial navigation systems will note that ‘angular rates’ and
‘accelerations’ are labelled as the inputs. In reality the DSP in the RT converts these to
‘change in angle’ and ‘change in velocity’ to avoid problems of coning and sculling.