81
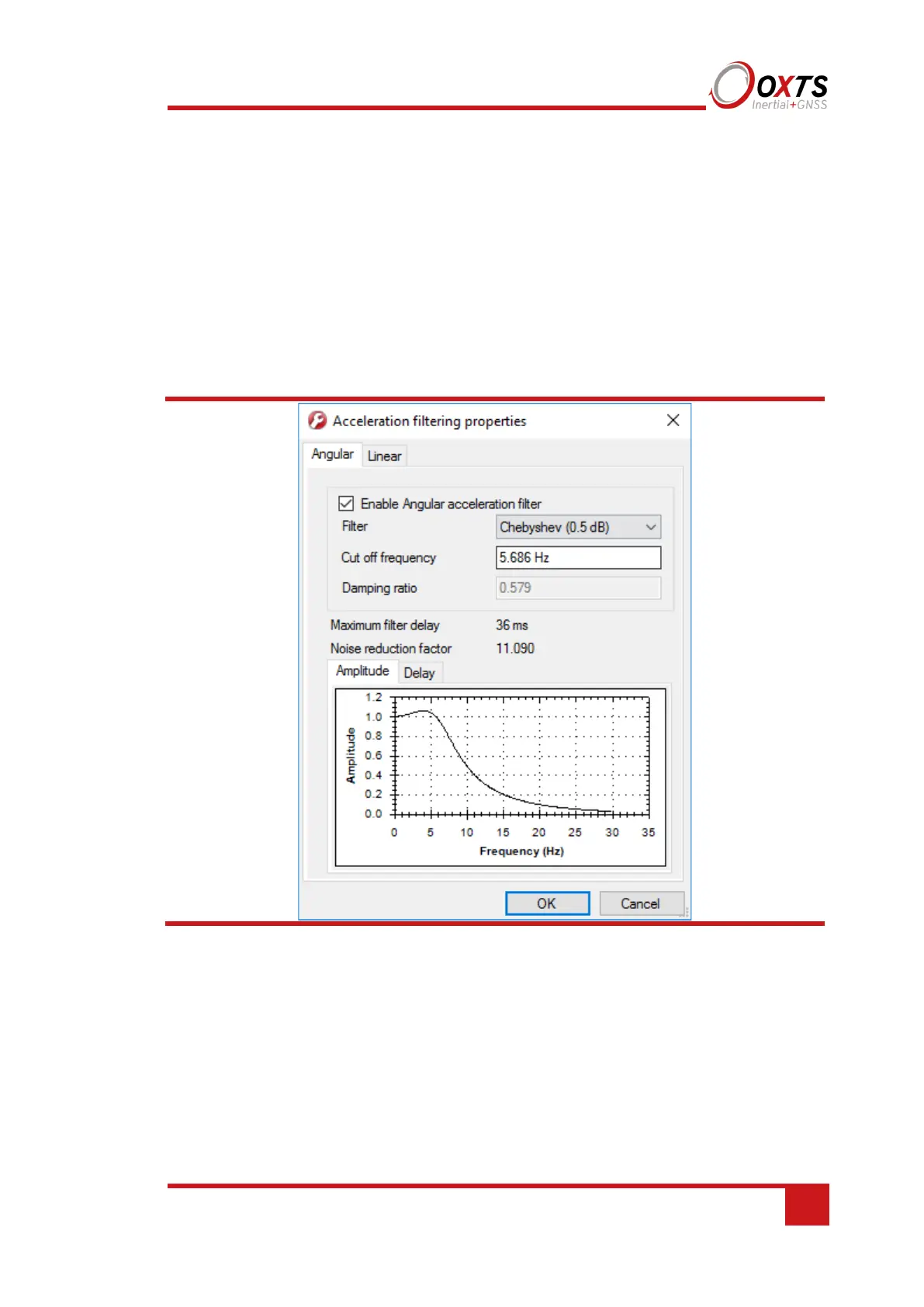
Designing the right filter is always a compromise between the noise reduction and the
filter delay. To help choose the filter, the software will compute the maximum delay over
the 0 to 5 Hz interval and the Noise Reduction Factor over the full bandwidth. The Noise
Reduction Factor is the ratio of the filtered noise compared to the unfiltered noise
assuming the vibration is white (i.e. same amplitude across the frequency spectrum). A
graph showing the delay with respect to frequency can also be plotted. The delay is the
additional delay of the filter and not the total delay of the acceleration output. The RT
has other delays, like calculation delay, too.
Figure 35. NAVconfig acceleration filter properties window
Wheel speed input
Adjustment: click … button to open properties window.
The RT can be factory configured to include a wheel speed input. This reduces the drift
in outputs when GNSS is not available. It is essential to use the Advanced slip feature
(page 64) at the same time as wheel speed corrections.