57
all systems that are connected to the network, so if more than one system is connected
ensure you select the correct system. Note: the list will not function correctly if
NAVdisplay or other software is using the RT UDP port unless the OxTS UDP Server is
running.
GNSS Selection
This page does not apply to RT devices and will remain unavailable.
Orientation
The Orientation page is used to define the vehicle co-ordinate frame relative to the RT’s
co-ordinate frame. It is important to get the orientation correct as although settings
entered on this page do not affect the accuracy of the RT, if the outputs are not properly
rotated to the vehicle frame then the measurements will appear incorrect.
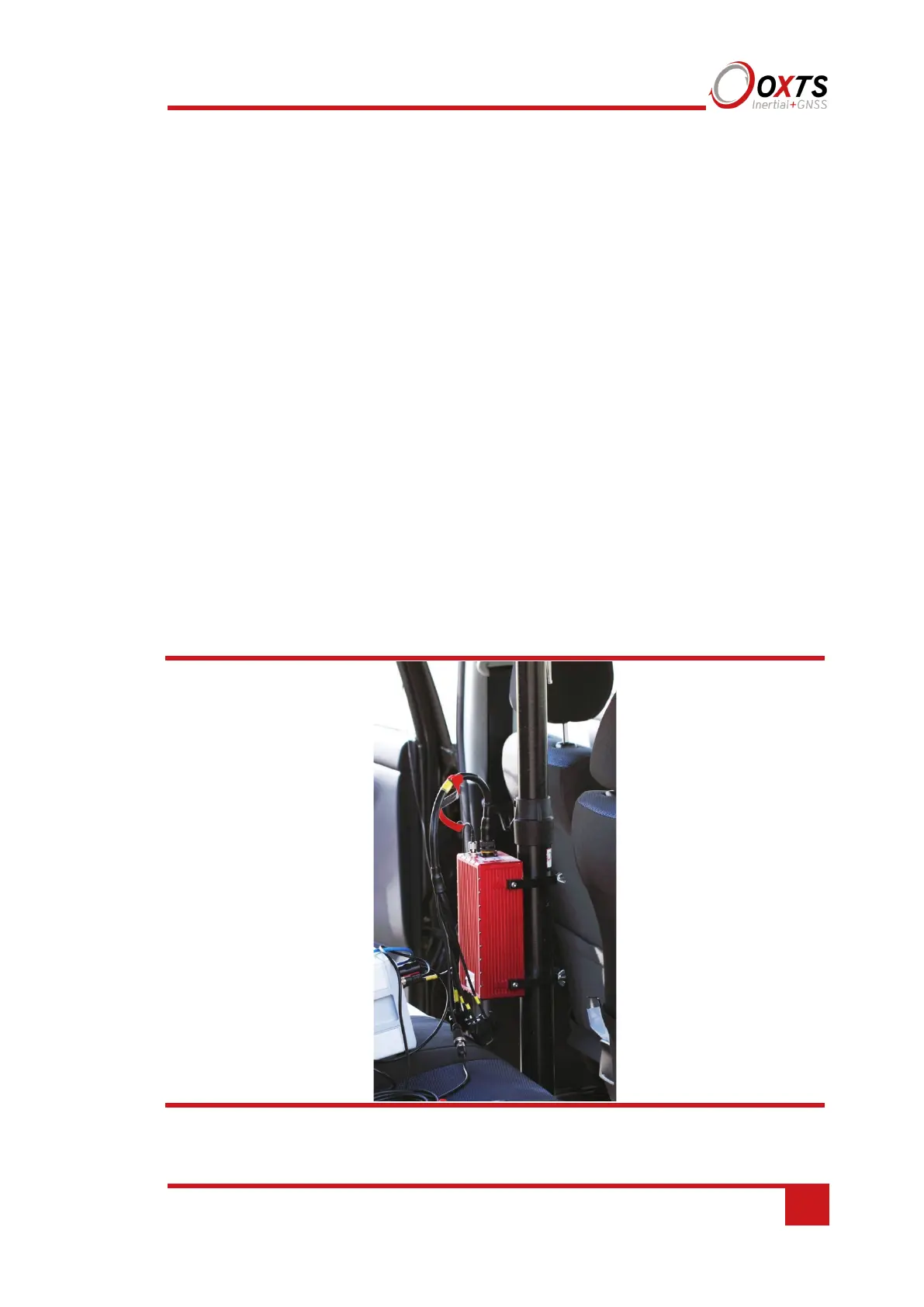
When using an RT-Strut, the orientation will need to be changed. Figure 18 shows an RT
mounted on an RT-Strut in a vehicle. In this configuration, the y-axis points left and the
z-axis points forwards. Other configurations are possible with the RT-Strut.
Figure 18. An RT device mounted on our RT-Strut system