77
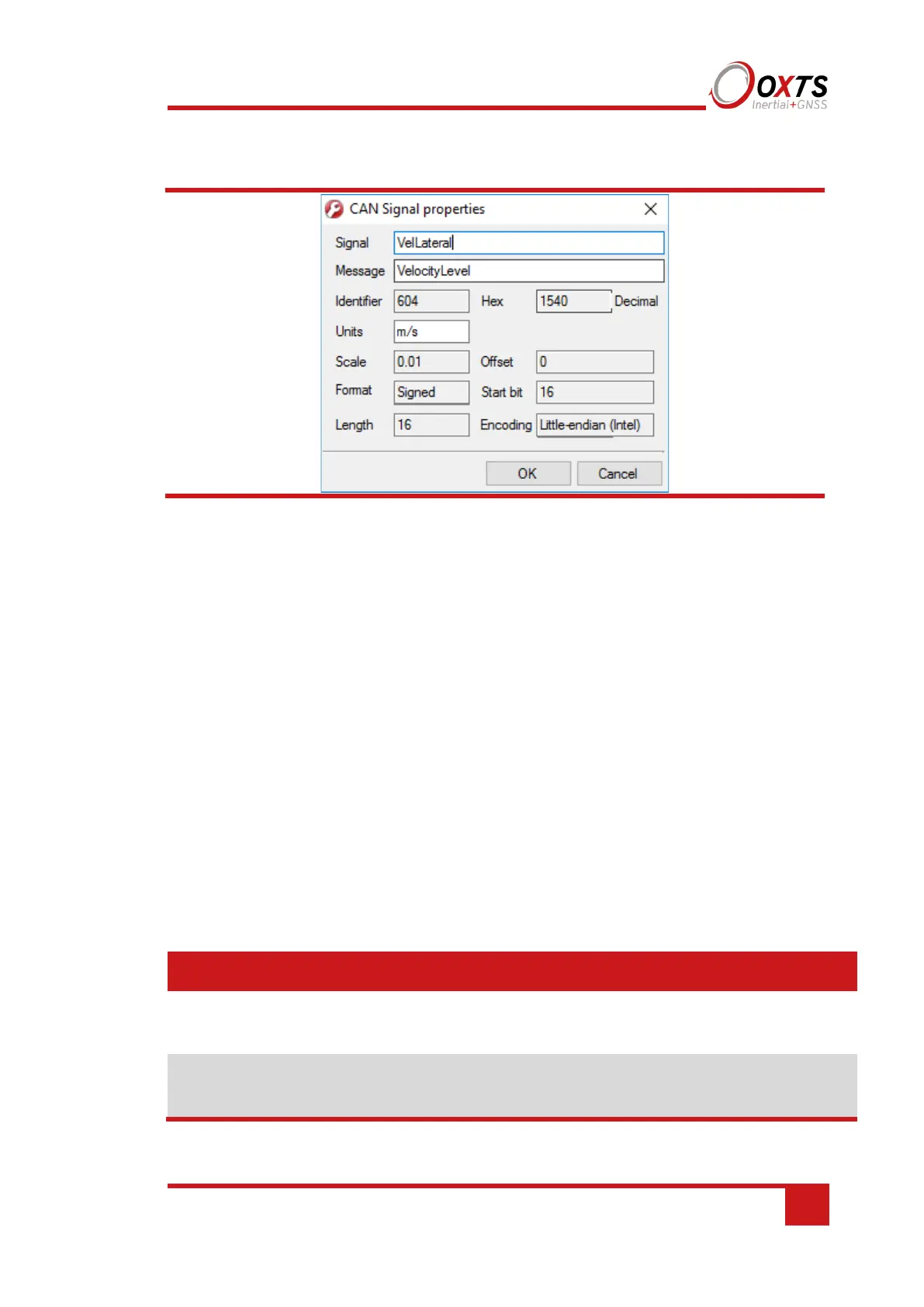
Figure 33. NAVconfig CAN signal properties window
Heading lock
Adjustment: select a predefined value from the drop down list.
The heading of single antenna systems can drift when the RT remains stationary for long
periods of time. To solve this, the RT includes an option to lock the heading to a fixed
value when stationary. This option cannot be used if the vehicle can turn on the spot (i.e.
with no forward velocity). With heading lock enabled the RT can remain stationary for
indefinite periods of time without any problems. For vehicle testing this option is
recommended.
There are four settings to choose from. Disabled should be selected if the vehicle can
turn on the spot. The default setting Normal is best for most applications as it is least
likely to cause problems in the Kalman filter. Tight and Very tight are better when trying
to reduce position drift in poor GNSS environments and traffic jams.
Table 32 gives a more detailed description on each of the heading lock options.
Table 32. NAVconfig heading lock options
Heading lock Description
Normal This option assumes the heading of the vehicle does not change by more than 2°
while the vehicle is stationary. The heading accuracy recovers quickly when the
vehicle moves.
Tight
This option assumes the heading of the vehicle does not change by more than 0.5°
while the vehicle is stationary. The recovery is fast if the heading of the vehicle
does not change but will be slow if the vehicle turns before it moves.