88
Oxford Technical Solutions
Steering robot IP
Adjustment: select a predefined value from the drop down list, or type in a value.
The default address (195.0.0.100) is listed in the drop-down list but can be changed if
required by typing the correct address. When the ABD Steering Robot is enabled, the
output smoothing is automatically enabled too.
Output smoothing
Adjustment: click … button to open properties window.
When the Kalman filter in the RT determines that there is some error to correct, this error
is applied smoothly rather than as a jump. The output smoothing controls how fast the
correction is applied to the outputs. This option is particularly useful for autonomous
vehicles or path-following robots as a rapid change in position can lead to a large change
in the steering angle.
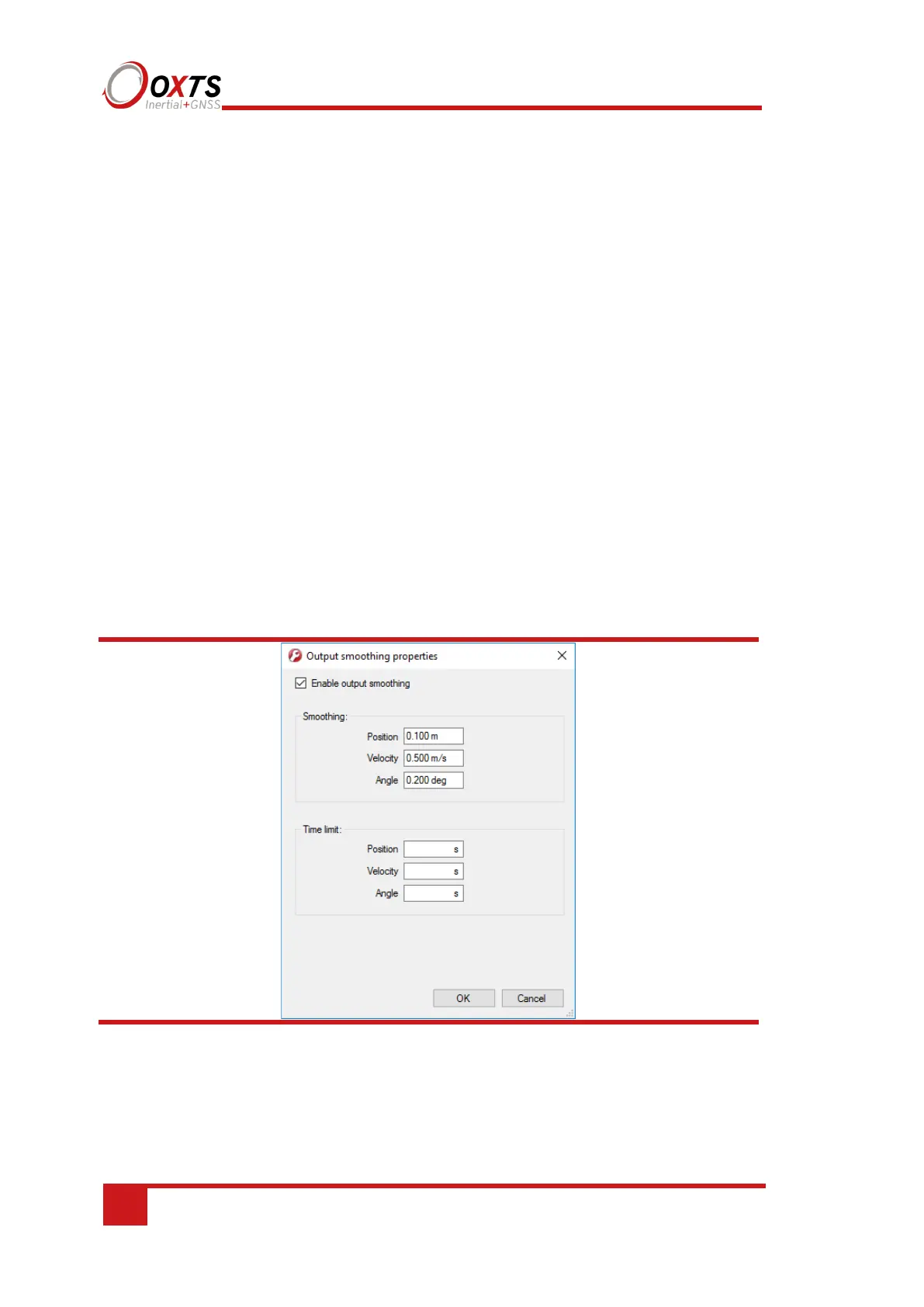
Figure 40 shows the Output smoothing window. Click the checkbox to enable output
smoothing and unlock the properties for editing.
Figure 40. NAVconfig output smoothing properties window
The smoothing of the position, velocity and orientation corrections can be controlled
independently. Enter the maximum correction that can be applied every second. For
example, if 0.1 m is entered for the position smoothing then the RT will only correct a
position error by a maximum rate of 0.1 m/s.