591
JAN 2006
Ver. 5.2
DP-3510/3520/3530/4510/4520/4530/6010/6020/6030
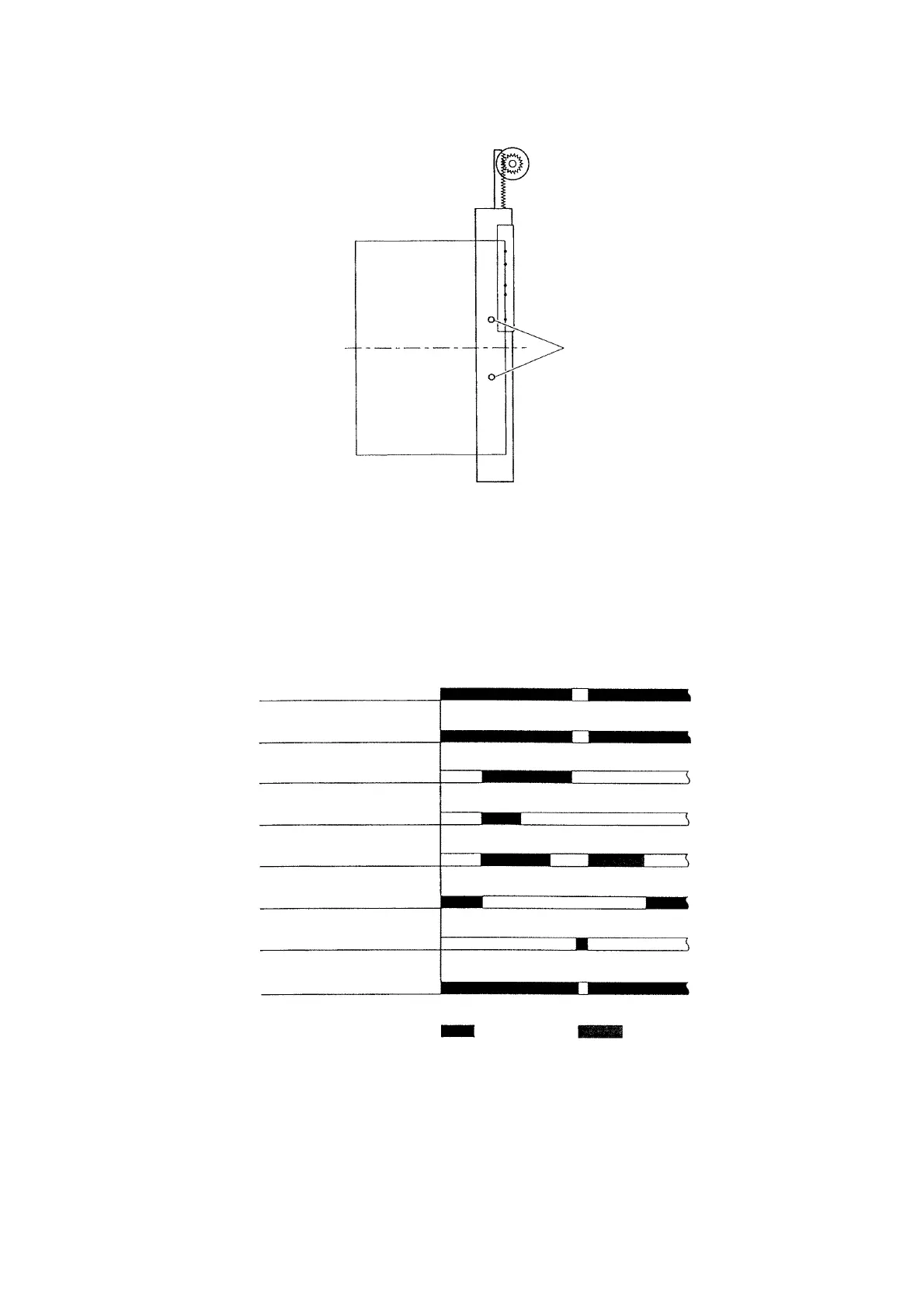
3. When the Trailing Edge Sensor (LED5, PTR5) detects the trailing edge of the paper, drive of the Inlet
Feed Motor (M9) and First Feed Motor (M1) on the Finisher is stopped to stop paper feed. Next, the
Punch Motor (M1P) is driven to punch the holes.
Fig. 4-014
4. When the punching operation ends, drive of the Inlet Feed Motor (M9) and First Motor (M1) on the
Finisher is started, the Horizontal Registration Motor (M2P) is operated in the reverse direction, and the
Punch Slide Unit is returned to its home position where it comes to a stop.
5. Even if paper to be punched continues to arrive, the Punch Slide Unit returns to its home position for
each arriving sheet, and steps 1 to 4 are repeated.
Fig. 4-015
Punc
Inlet Feed Motor (M9)
First Feed Motor (M1)
Trailing Edge Detection Sensor
(LED5, PTR5)
Horizontal Registration Sensor
(LED1 to 4, PTR1 to 4)
Horizontal Registration Motor
(M2P)
Horizontal Registration Home
Position Sensor (PI1P)
Punch Motor (M1P)
Punch Home Position Sensor
(PI3P)
: Motor CW : Motor CCW

 Loading...
Loading...