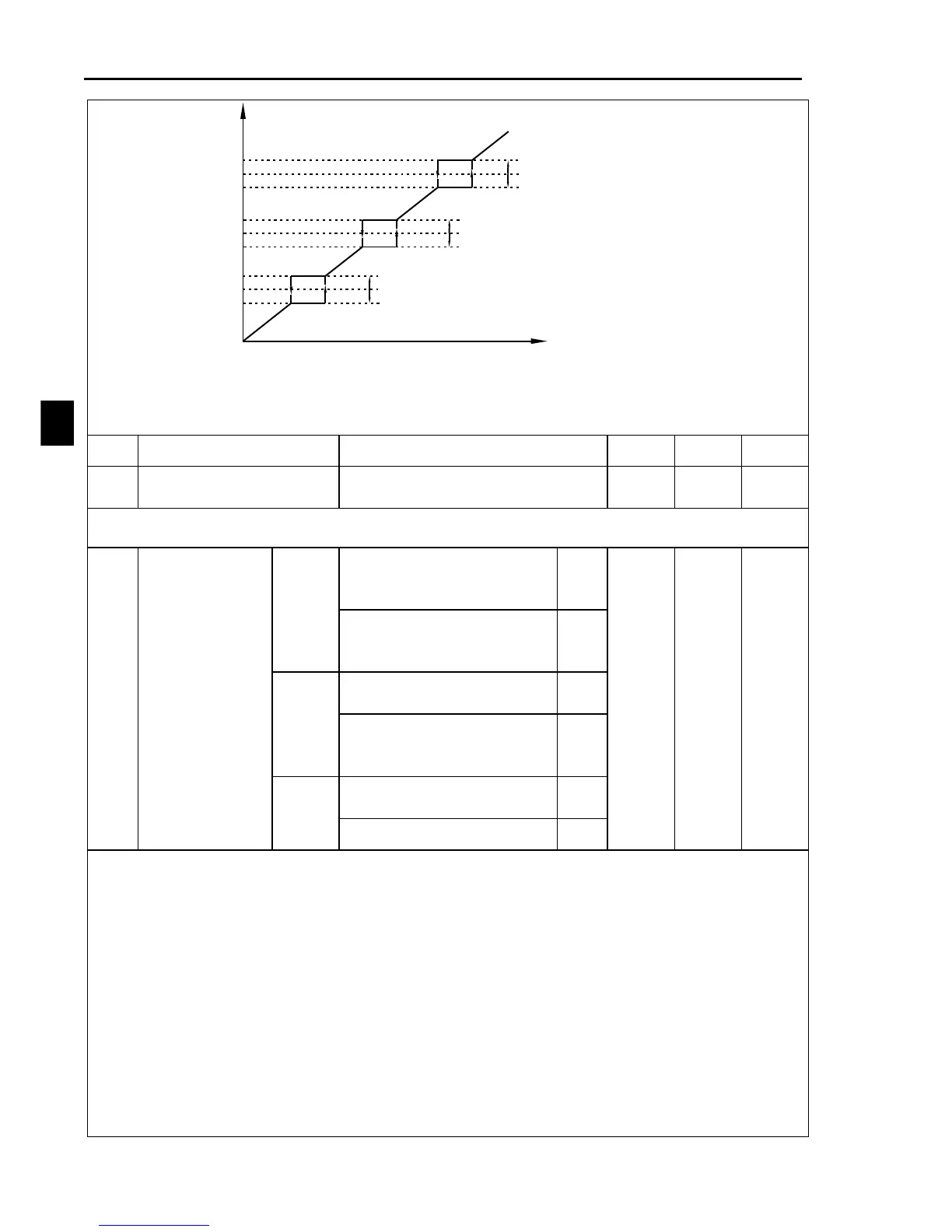
Upper skip frequency and lower skip frequency define skip frequency range.
In the acceleration and deceleration process, inverter output frequency can normally through
skip frequency area.
After inverter startup, it firstly run with preset frequency, running time is preset frequency
time, then it will run with given frequency. Jog run will not be effective by preset frequency.
1 bit: used to change the direction of motor running
0: Forward command FWD is to let motor forward running.
1: Forward command FWD is to let motor reverse running.
10 bit : Motor forward reverse running can be controlled by the keyboard potentiometer and
analog input positive or negative value.
0: Prior command: terminal / keyboard, set frequency can be negative value, but running
direction decided by terminal and keyboard command.
1: Prior command: positive or negative value of analog input, setting frequency positive
value let motor forward running, setting negative value let motor reverse running.
100 bit: motor reverse allow.
For some producing equipment, the reverse may lead to damage to the equipment, so this
feature can be used to prevent motor reverse, Inverter default forbidden reverse. When the
motor running direction opposes to equipment required direction, you can exchange the
wiring of any two inverter output terminals to let equipment forward running direction is

 Loading...
Loading...
