Section V Parameter Function Table
33
Jog direction: direction
determined by the main
terminal
Jog end mode: stop running
Jog end mode:reset to the
former state before jog
Jog end and acceleration
deceleration time: reset to
the set acceleration and
deceleration time before jog
Jog end and acceleration
deceleration time: save the
set acceleration and
deceleration time before jog
Lower frequency~upper frequency
Jog acceleration/deceleration time configuration defines the same section of acceleration /
deceleration time.
The direction of jog is set by the unit bit of F35,when the Jog command does not contain the
direction of jog, the direction of job will run as to the unit bit designated by F35. It is set to 2, the
direction of jog is run by the terminal or current direction.
The running status after jogging is identified by F35.
Whether jog acceleration/deceleration time is maintained through the confirmation on
hundred bit of F35 after jogging.
F34
F33
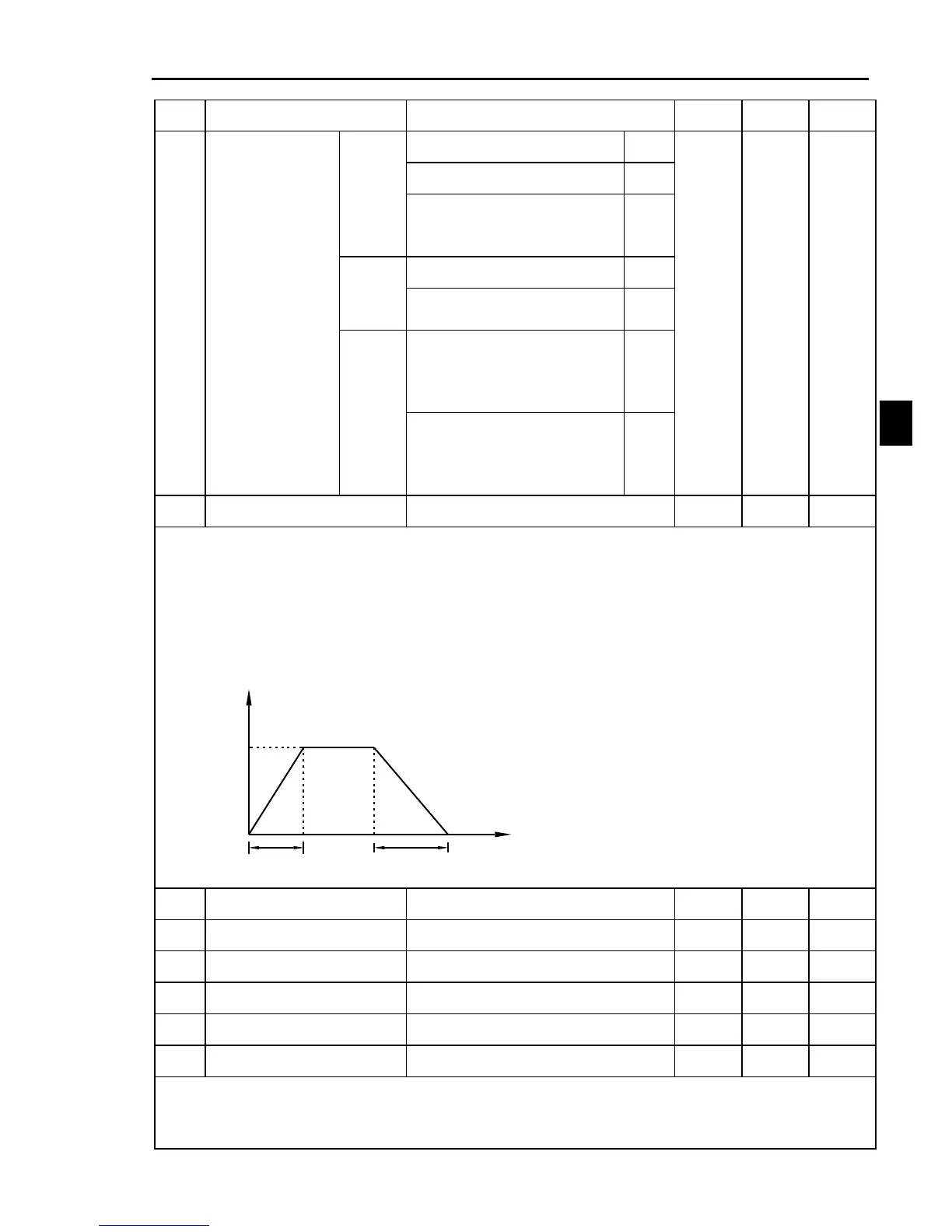
running time
Linear Acceleration
Fmax
During running, to skip resonance produced by the immanent resonance point in the
machine systems, skip mode can do this.
At most three resonance points could be set to skip.

 Loading...
Loading...

