Section V Parameter Function Table
93
Define the current loop integral time
When integral time is too long, response is inactive; the ability to control external jamming
becomes weak
When integral time is short, response is fast, if too short, vibration will occur.
Define current loop proportion gain, When select big gain, response fast, but too big will
occur vibration. when select low gain, response lag
When encoder and motor is in different shaft, can calculate current motor speed according to
encoder and gear ratio.Electronic gear A for denominator, B for molecule.
PG pulse quantity used, set value is the pulse quantity when motor rotates for a circle.
Warning and keeping
running
Warning and deceleration
stop
Set the brake method when detect PG break.
0: NO PG break protection
1: Warning and keeping running
2: Warning and deceleration stop.
3: Warning and free stop.
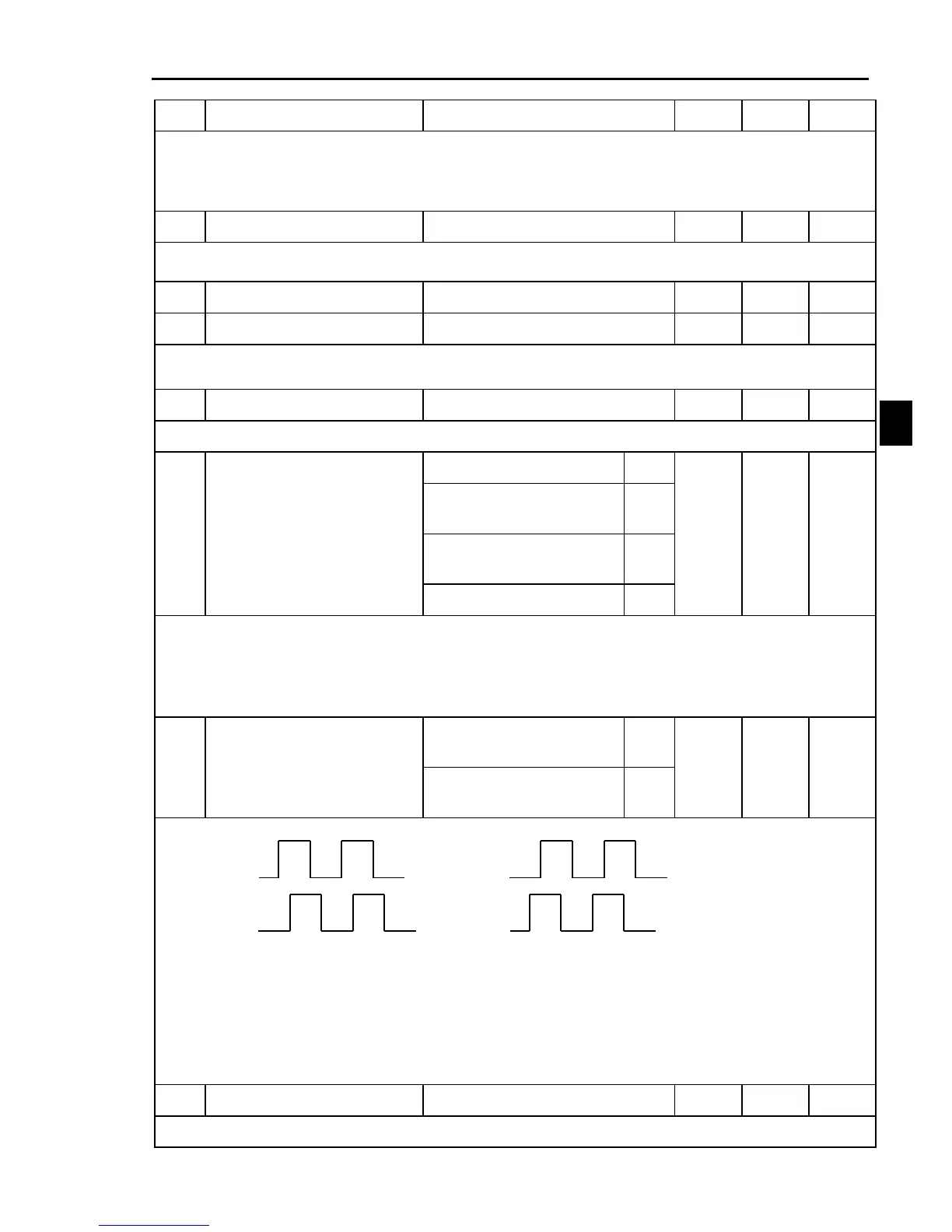
When motor forward,
phase A leads
When motor forward,
phase B leads
phase A
phase B
phase A is forward
phase A
phase B
phase B is forward
Encoder rotating direction, refer to the motor forward direction
0: When motor forward, phase A leads, set C27= 0
1: When motor forward, phase B leads, set C27= 1
Note: above parameters are valid when with encoder(PG), need to layout PG card. If needed,
please contact our company.
PG dropped inspection time
PG feedback signal is 0, exceed C31 set time, system reports PG dropped fault. Set speed to

 Loading...
Loading...
