forward
backward
translate
right
translate
left
up
down
turn
right
turn
left
Base
0 m
10 m
min. 20 m
20 m – 150 m
Free of obstacles
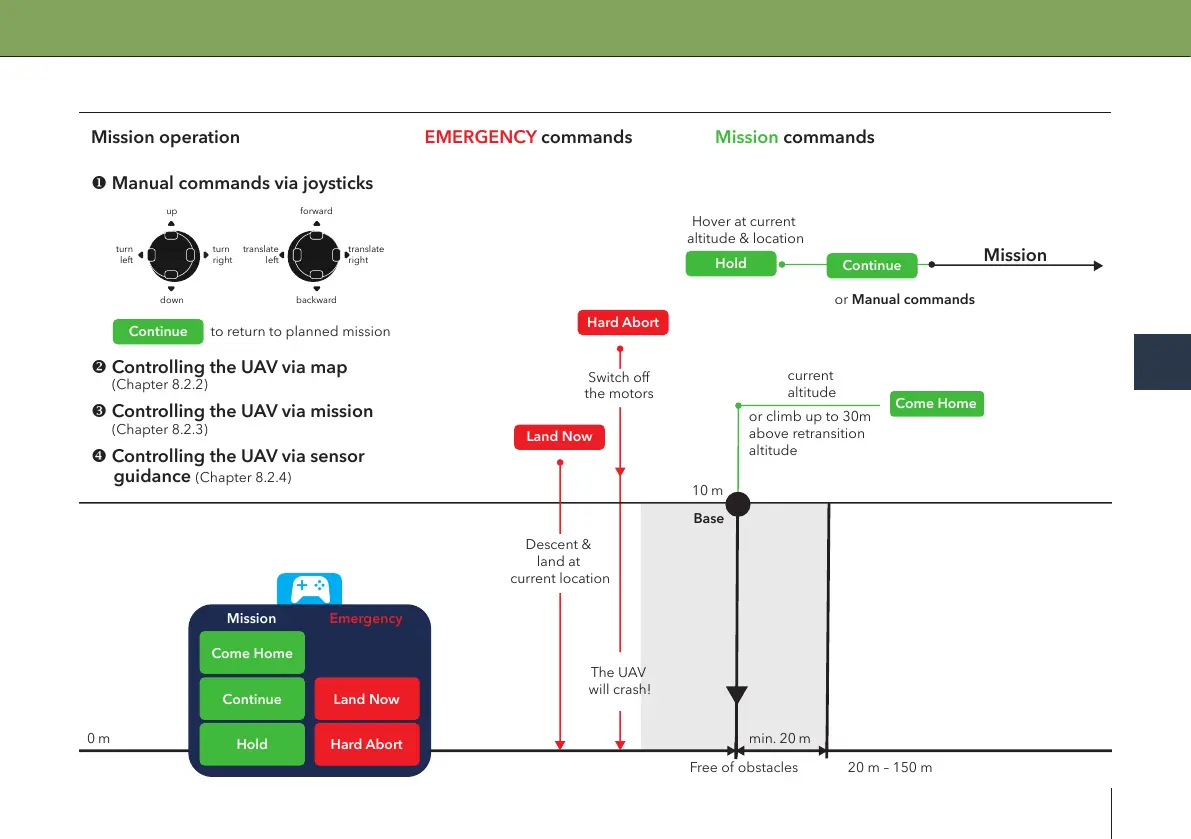
EMERGENCY commands Mission commands
Descent &
land at
current location
The UAV
will crash!
Mission operation
Controlling the UAV via map
(Chapter 8.2.2)
Controlling the UAV via mission
(Chapter 8.2.3)
Controlling the UAV via sensor
guidance
(Chapter 8.2.4)
Manual commands via joysticks
Switch off
the motors
current
altitude
or climb up to 30m
above retransition
altitude
Hover at current
altitude & location
Mission
Come Home
Continue Land Now
Hold Hard Abort
Mission Emergency
or Manual commands
Continue
Hold
Hard Abort
Land Now
Come Home
Continue to return to planned mission