2F-85 & 2F-140 - Instruction Manual
Features
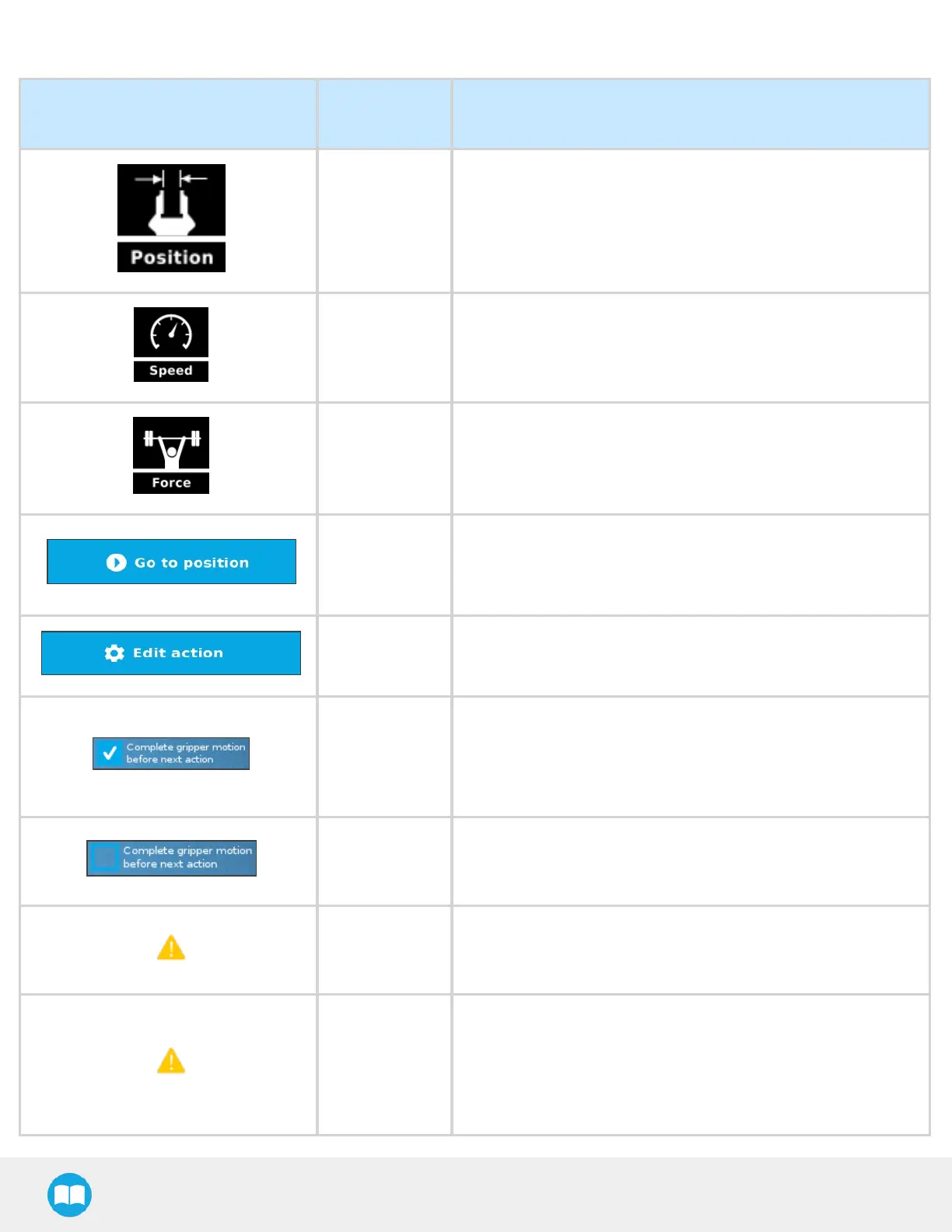
Icon
Functionality
Name
Description
Requested
position
Shows the position requested for the current Gripper node. Read
only.
Requested
speed
Shows the speed requested for the selected Gripper node. Read
only.
Requested
force
Shows the force requested for the selected Gripper node. Read
only.
Go to position
Sends all node parameters (position, force, speed) to the gripper.
Note: Thisbutton isdisabled (grey)when the gripper isalready at
the node position or when the gripper isnot powered/activated.
Edit action
Opens the Edit action screen, where you can edit the gripper’s
action parameters.
Complete
motion
Selected by default.
Selected: The gripper completes its motion before executing the
next action on the PolyScope program tree. Thisis slower but
safer.
Do not
complete
motion
Unselected: Assoon as the gripper starts moving, PolyScope will
execute the next action on the program tree. Thisallowsyou to
move the gripper and robot at the same time.
Warning
message
section
-
Gripper not
activated
“ Warning, the gripper isnot powered or not activated. The
Gripper will not move.”
Make sure that the gripper isinstalled correctly and powered.
You need to activate it using the Gripper Toolbar before running
Gripper commands.
104