2F-85 & 2F-140 - Instruction Manual
Multiple GrippersInstallation
When installing multiple grippers on one robot, every gripper must have its own coupling.
1. Install a mounting plate first on the robot arm (AGC-APL-159-02).
2. Mount the grippers' couplings on the mounting plate using the provided M6 X 12 mm screwsand tooth lock washers.
3. Mount the grippers onto the coupling using the provided M5 X 25 mm screwsand tooth lock washers.
Fig. 3-5: Dual 2F Gripper Configuration (CB-Seriesand e-Series)
For e-Series:
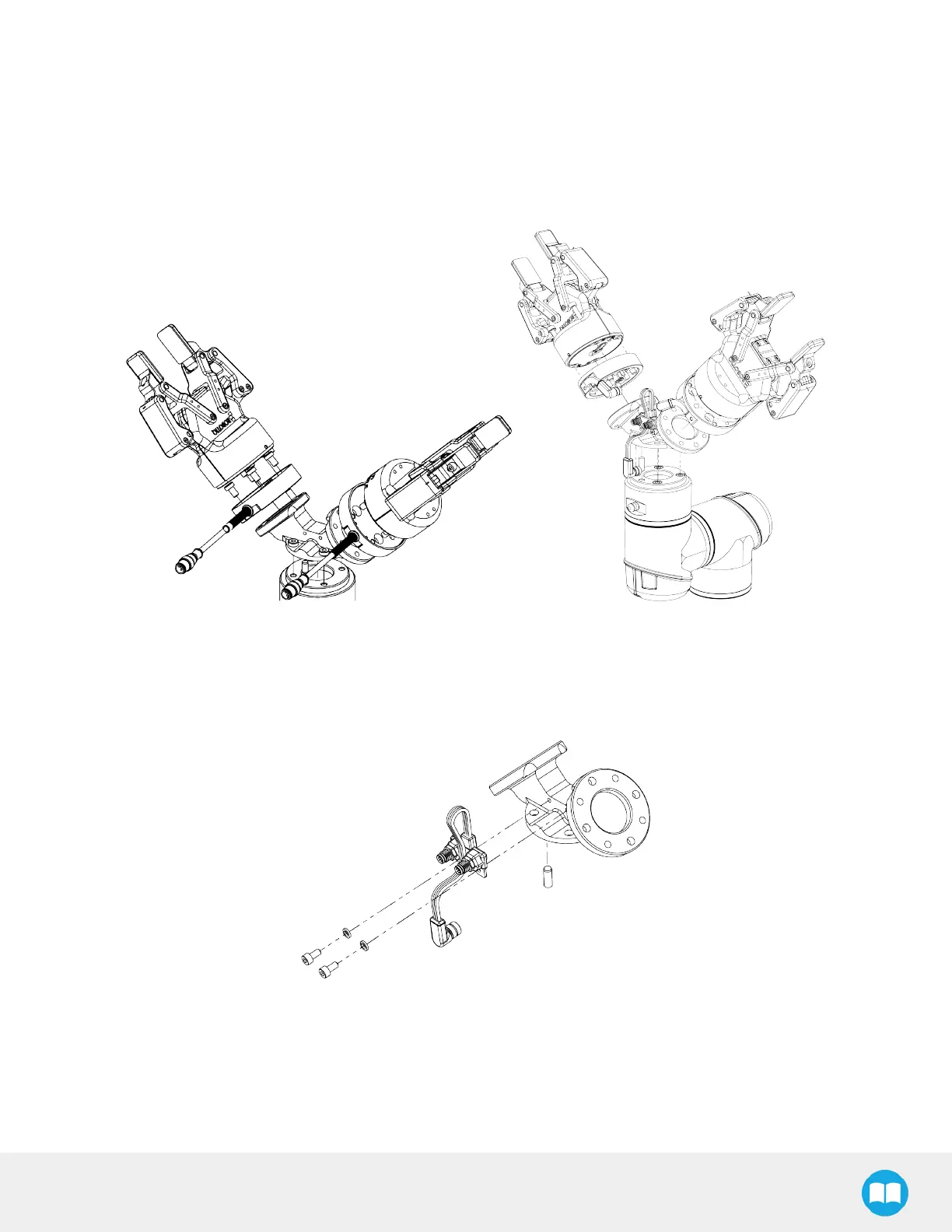
1. Fasten the M8 splitter (ACC-SPLIT-M8-2:1) to the dual gripper adapter plate (AGC-APL-159-002)
a. Make sure the splitter isfastened on the side of the adapter plate that receivesthe dowel pin.
Fig. 3-6: Fastening the splitter to the dual gripper adapter plate
27