2F-85 & 2F-140 - Instruction Manual
If additional cable isused, suggested cable specifications are as follows:
Power supply, fusing:
l
minimum #22 AWG TEW, 300 Vor 600 V
RS485 signal :
l
minimum #24 AWG TEW, 300 Vor 600 V
l
A and B signalsmust be balanced at 120 Ohms
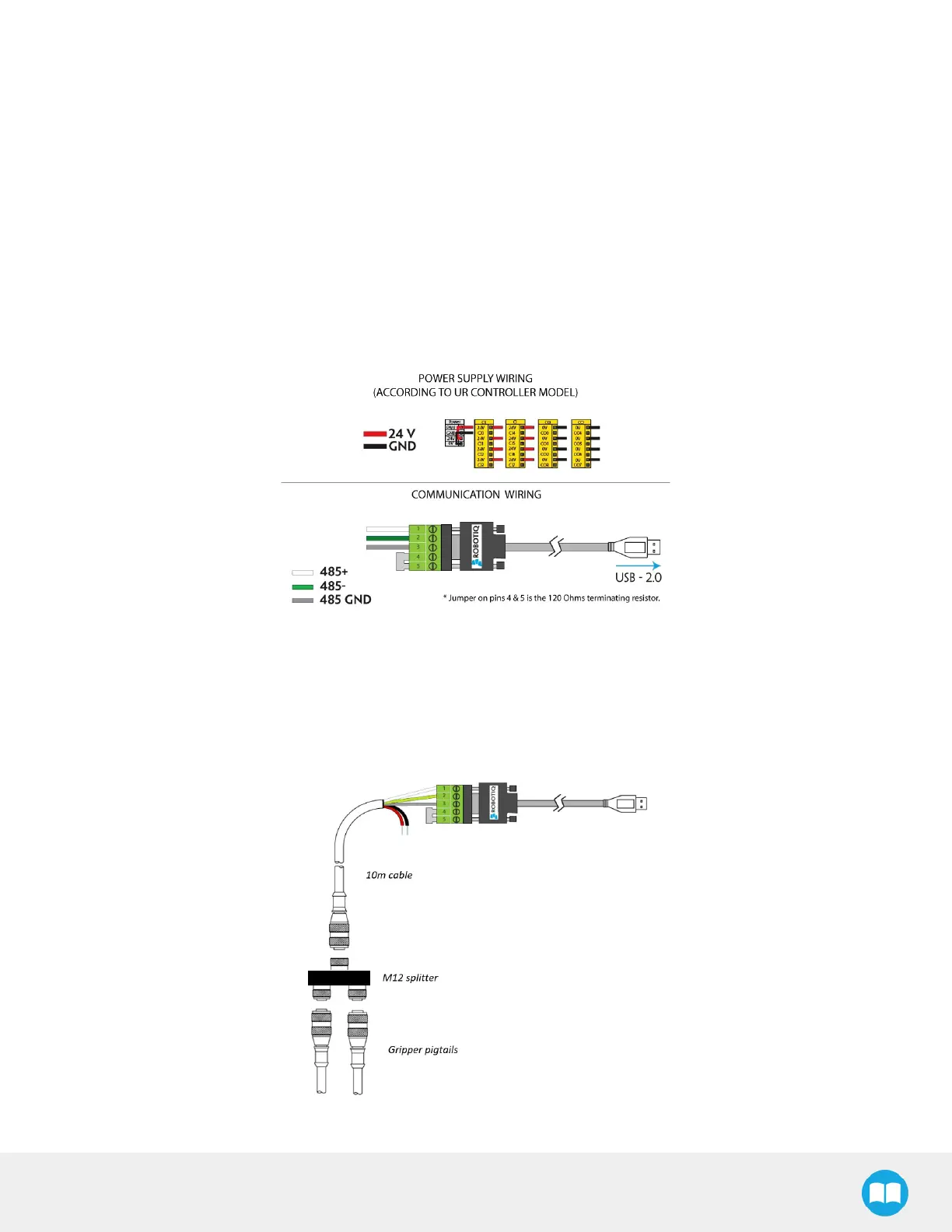
Single Gripper
Prior to any software installation on Universal Robots, connect the white, green and bare wires to the Robotiq RS-485 signal
converter (ACC-ADT-USB-RS485)asshown in the figure below. Also connect the red (24V) and black (0V)wires in the controller
according to that same figure.
Fig. 3-13: 2-Finger Adaptive Gripper wiring to robot controller.
Multiple Grippers
It is possible to connect and control up to four grippers on the same URrobot. Only one RS485 to USB converter (ACC-ADT-USB-
RS485)must be used. Use M12 splitters (ACC-SPLIT-M12-2:1)to connect all the grippers pigtails to one 10m cable (CBL-COM-
2065-10-HF) that connects to the RS485 to USB converter.
Fig. 3-14: Multiple grippers wiring on CB-Series Universal Robots.
33