14 Rockwell Automation Publication 2198-RM003B-EN-P - November 2020
Chapter 2 Replacement Considerations
Design considerations:
• Verify that the existing controller is compatible with the Kinetix 5100
system (for example, DeviceNet vs. EtherNet/IP).
• Verify that your current motor is compatible.
• Verify that the feedback cable length in your existing system does not
exceed the max feedback cable length or the max power cable length for
the new system.
• Verify that the drive size is compatible.
• Verify that the drive dimensions are compatible.
• Verify the drive connections (and/or connectors) are acceptable or
compatible.
See the technical data documents and the design guides in the Additional
Resources for motor, cable, and drive combinations.
Drive Sizing There are a number of different factors that affect the selection of a
replacement servo drive and the system redesign effort. Drive sizing is the
primary factor in which replacement servo drive you select. To identify the
correct replacement drive size, compare the continuous and peak output
current ratings.
Most Ultra3000 drives can be replaced with a Kinetix 5100 drive of similar, or
in some cases greater, output current capability. The Kinetix 5100 drives
require less physical space than the Ultra3000 drives.
Other factors that affect drive replacement include:
• Drive Sizing (ratings and physical size)
•Dimensions
• Drive Interconnects and Cabling
• Communication network
• Accessories, such as shunts and line filters.
Cable Length Support cable lengths for motor and power up to 90 m (295.2 ft).
Drive-to-motor power and feedback cables must not exceed:
• 50 m (164 ft) for axes with Kinetix MP servo motors with Hiperface
encoder feedback
• 50 m (164 ft) for axes with Kinetix TLP servo motors and 24-bit high-
resolution serial encoder feedback
• 30 m (98.4 ft) for axes with Kinetix TL and TLY servo motors and 17-bit
high-resolution or incremental encoder feedback
• 30 m (98.4 ft) for axes with Kinetix MP (Cat. No. MPL-Axxxx-H) servo
motors and incremental encoder feedback
Physical Dimensions —
The Kinetix 5100 drive has smaller dimensions and fits in the space of the
Ultra3000 drive. The drill hole patterns differ from that of Ultra3000
drives.
Control and Auxiliary
Power
Optional 5V DC (breakout board with 24V DC to 5V converter
available) auxiliary power for smallest 3 drives. Optional single-
phase 100…240V AC for larger drives.
200V-class 1PH 120V or 230V
400V-class 24V DC
Dual Position Loop / Aux
Feedback Port
Does not support Dual position loop / Aux feedback port.
Supports Dual feedback inputs for:
• Master Follower (PT mode)
• Dual Loop Control (PR/PT/IO mode)
• Aux Feedback (PR mode) as a Master for E-CAM function
Motor Brake Has a dedicated relay output for operating motor brake.
Any digital output can be configured as Motor Brake. This output must
include an external relay to control motor holding brake.
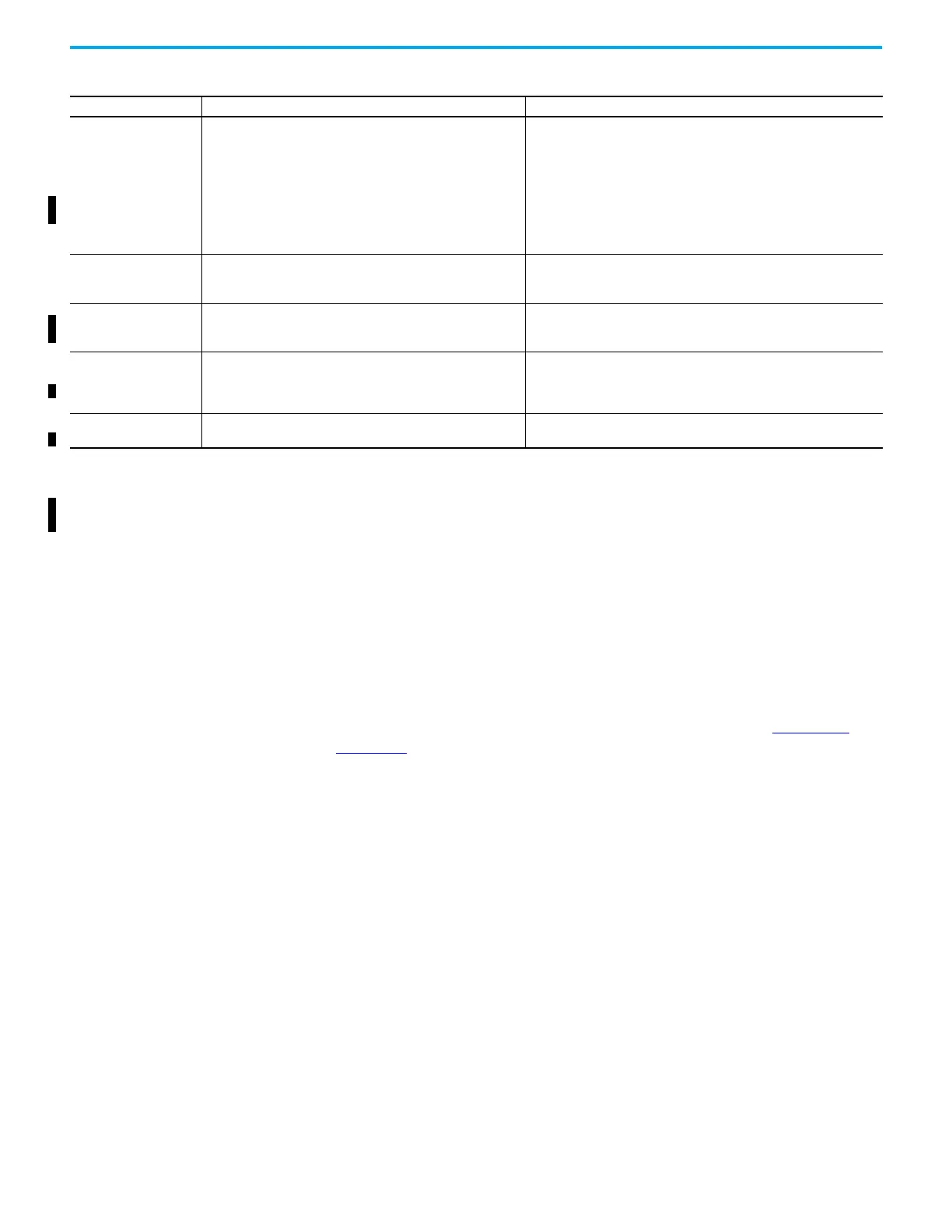
Table 7 - Migration Considerations (Continued)
Feature/Function Ultra3000 Drive Kinetix 5100 Drive
 Loading...
Loading...











