Rockwell Automation Publication 2198-RM003B-EN-P - November 2020 75
Chapter 5 System Architecture
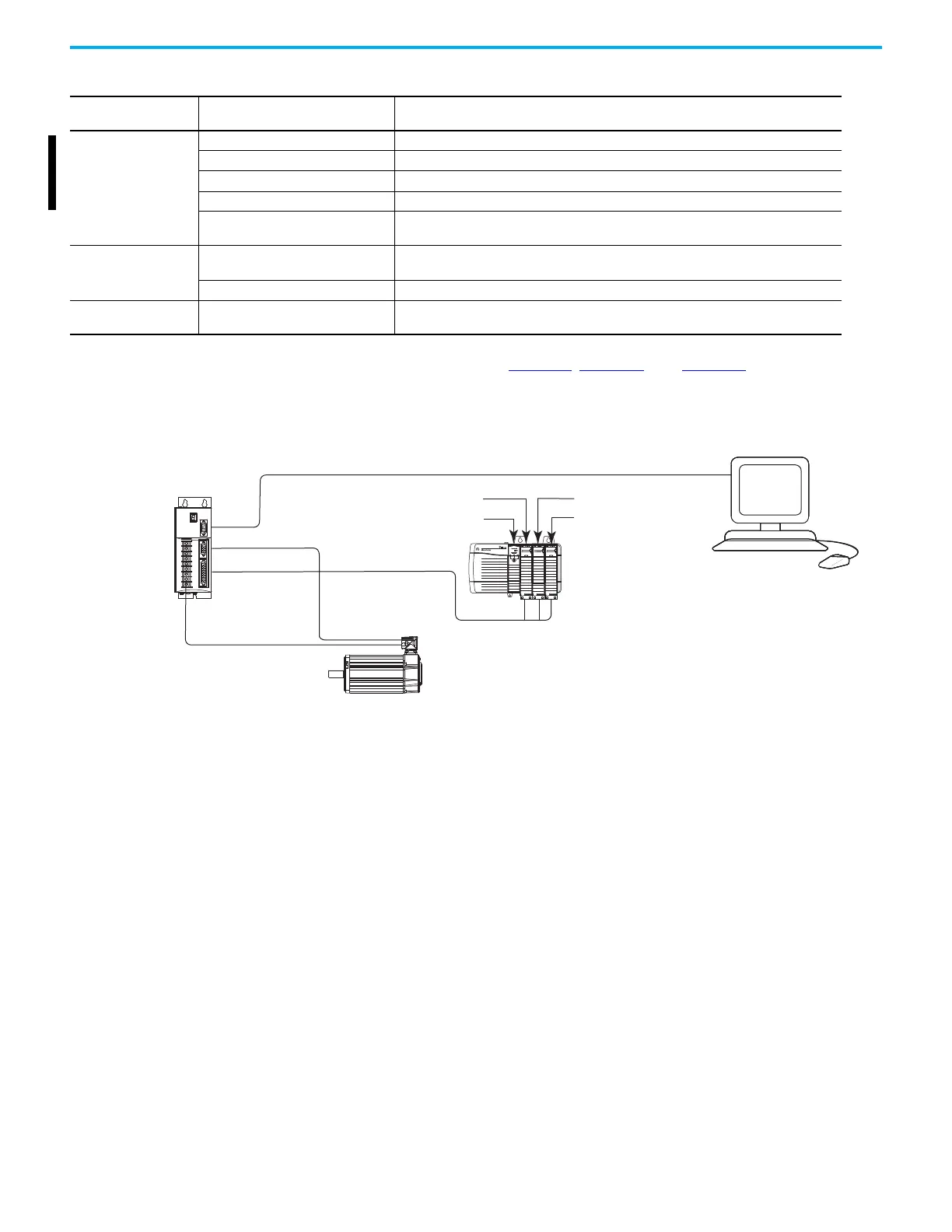
This system examples in Figure 41, Figure 42, and Figure 43 illustrate how the
required drive modules and accessories are used in a typical Ultra3000 servo
drive system.
Figure 41 - Ultra3000 Servo Drive System Architecture (Serial Interface)
Cables
2090-CFBM6Dx-CxAAxx Motor feedback cables for Kinetix TLY servo motors.
2090-CPxM6DF-16AAxx Motor power/brake cables for Kinetix TLY servo motors.
2090-CFBM7DF-CEAxxx Motor feedback cables for Kinetix MP servo motors with Hiperface encoders.
2090-CPxM7DF-xxAxxx Motor power/brake cables for Kinetix MP servo motors.
2090-XXNFMF-Sxx
2090-CFBM7DF-CDAFxx
Standard and continuous-flex feedback cables that include additional conductors for use
with incremental encoders.
AC Line Filters
2090-UXLF-xxx
AC line filters with 6 A, 10 A, 23 A, 32 A, 36 A, and 50 A are available for Ultra3000 (230V) drive
systems.
2090-UXLF-HVxxx AC line filters with 23 A, 30 A, and 50 A are available for Ultra3000 (460V) drive systems.
External Shunt Modules
2090-UCSR-xxxx, 9101-1183, and 2090-
SRxxx-xx
External shunt modules are available when the Ultra3000 drive internal shunt capability is
exceeded.
Table 63 - Typical Ultra3000 Servo Drive System (Continued)
Ultra3000 Drive System
Component
Cat. Nos. Description
Output
Logix Interface Module
Commissioning and Communication
Ultraware
Software
Motor Feedback
I/O and Commands
Motor Power
Logix Controller
Input
Logix Platform
(ControlLogix is shown)
MP-Series and TL-Series
Rotary Motors
(MPL-A xxxx motors shown)
Ultra3000 Drive
Other compatible motors/actuators include:
• MP-Series Integrated Linear Stages
• MP-Series Electric Cylinders
• LDC-Series and LDL-Series Linear Motors
2098-DSD-xxxxxx-xx)

 Loading...
Loading...










