Kapitel 13 Betriebsanleitung
DME5000
70 © SICK AG • Deutschland • Irrtümer und Änderungen vorbehalten 8009813/ZJV1/2017-05
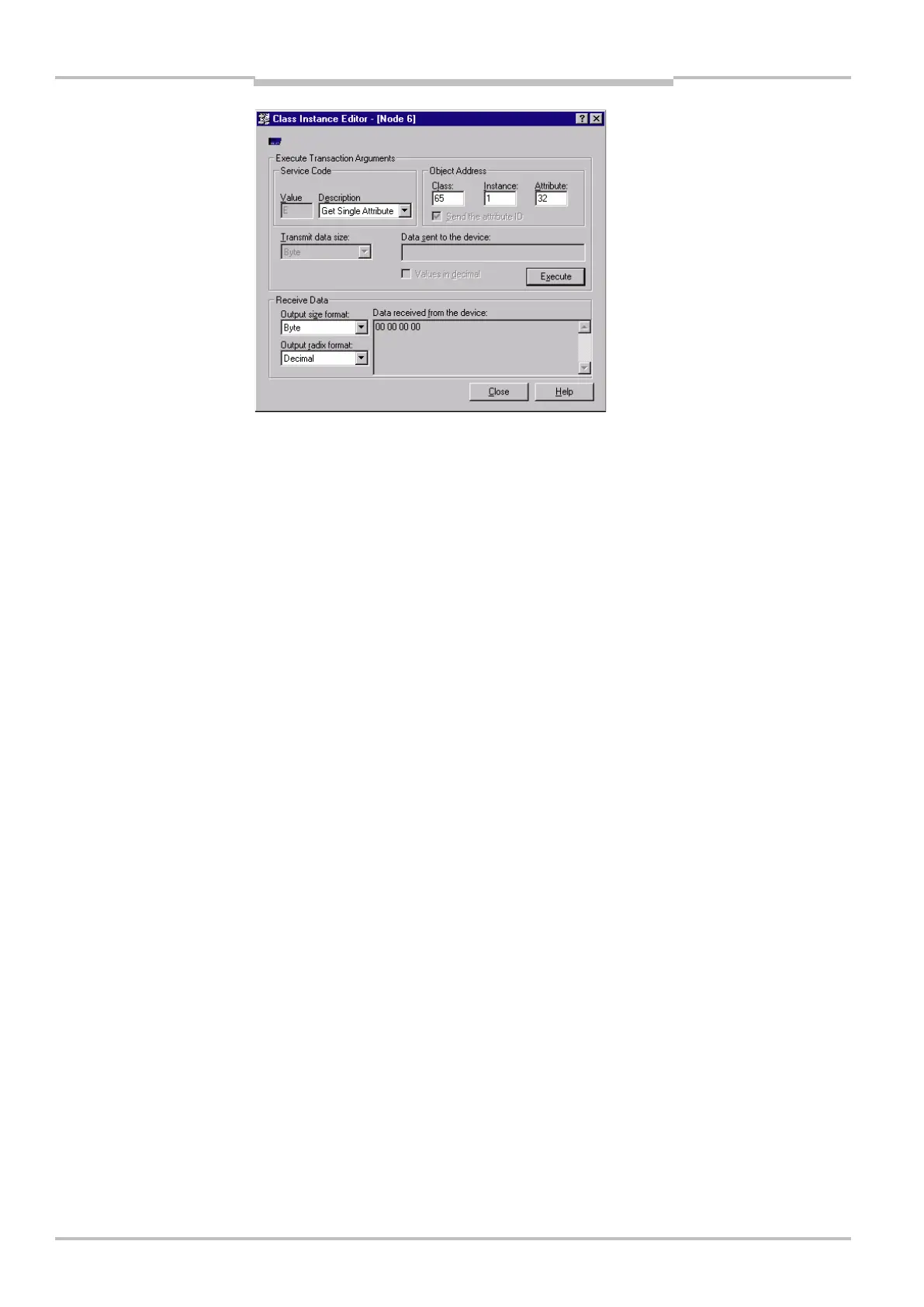
Betriebsstunden
Description: Get single Attribute
Class: 64
Instance: 1
Attribute: 32
Receive Data: Zeit: 0 x 0142 = 322 x 6 min = 1932 min = 32,2 h
z. B. 01 02 03 04 = 0 x 04030201 = 67305985 x 6 min =
403835910 min = 6730598,5 h
13.8 Hiperface-Schnittstelle
Beim Einschalten stellt das DME5000 einen absoluten, digitalen Distanzwert zur Verfü-
gung. Dieser wird vom Regler über den RS-485-Parameterkanal abgefragt. Bezug neh-
mend auf diesen Absolutwert zählt danach der Regler bei Verfahrung inkrementell die
Nulldurchgänge der analogen sin/cos-Signale und bestimmt daraus die aktuelle Position.
Über den RS-485-Parameterkanal kann parallel hierzu jederzeit ein absoluter Distanzwert
abgefragt werden. Dies ermöglicht eine Kontrolle des inkrementell bestimmten Positions-
wertes.
Bei einem rotativen Motorfeedback-System werden die analogen sin/cos-Signale direkt
durch die Abtastung der im Geber liegenden Codescheibe, die in starrer Verbindung mit
der Motorwelle steht, erzeugt. Aus regelungstechnischer Sicht ergibt sich damit ein hoch-
dynamisches, reines P-Verhalten mit sehr rauscharmen sin/cos- Signalen. Zusätzlich zum
Zählen der sin/cos-Nulldurchgänge kann deshalb durch eine optionale, steuerungsseitig
implementierte Arctan-Interpolation die Auflösung deutlich erhöht werden.
Das DME5000 arbeitet, im Gegensatz zu rotativen Systemen, nach dem Messprinzip der
Lichtlaufzeitmessung. Der Messkern des DME5000 ermittelt dabei immer einen digitalen
Distanzwert, aus welchem die analogen sin/cos-Signale über einen D/A-Wandler erzeugt
werden. Deshalb weisen diese Signale ein erhöhtes Rauschen auf, welches steuerungs-
seitig keine Arctan-Interpolation zur Erhöhung der Auflösung zulässt, sondern ausschließ-
lich das Zählen der Nulldurchgänge erlaubt.
Die Auflösung des Distanzwertes kann ausschließlich über den Parameter „Period Length“
eingestellt werden. Je nach Einstellung und der damit aktivierten Typ-Kennung ergeben
sich die folgenden Auflösungen für den RS-485-Parameterkanal bzw. die Periodenlängen
und die daraus abgeleitete Auflösung des analogen sin/cos-Prozessdatenkanals
basierend auf der Zählung der Nulldurchgänge.