SYSTEM DESCRIPTION 3
8023994-17I6/2020-03-19|SICK
Subject to change without notice
ORIGINAL OPERATING INSTRUCTIONS| VMS4100/5100
3.5 Determining measurement results and outputting data
3.5.1 Recording of measured values and 3D modeling
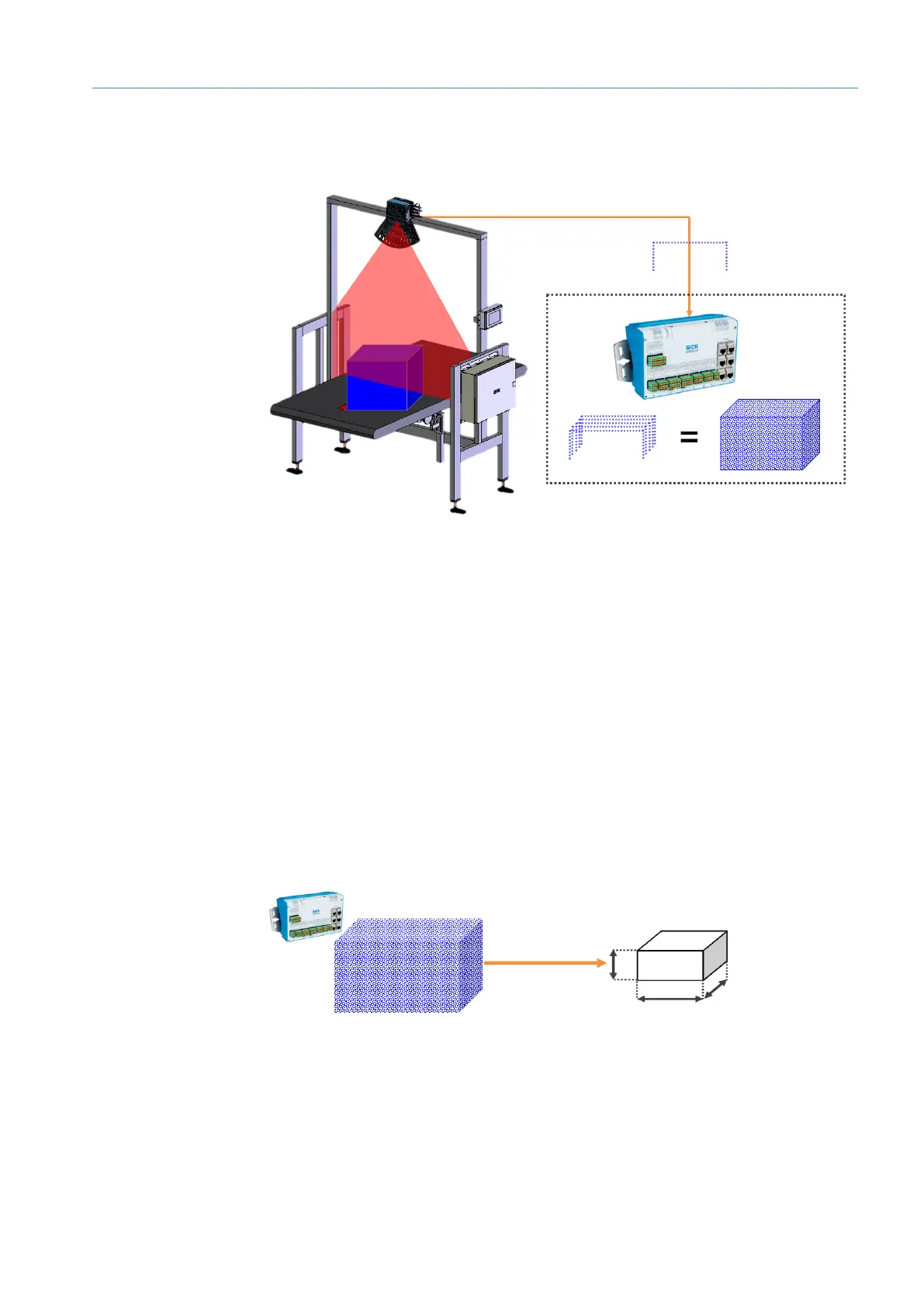
Fig. 25: Measuring point detection by LMS4xxx and measuring point processing in SIM2000
• The calculation of measurement values begins as soon as one or more objects are
transported beneath 2D LiDAR sensor.
• The measuring points detected are cyclically transmitted to the SIM2000 system
controller.
• When the detected conveyor speed and the specific position of the object on the belt
are factored in, a spatial model of the object(s) is created.
3.5.2 Evaluating the 3D model in each operating mode
The calculated 3D model is evaluated in the SIM2000 system controller according to the
set operating mode.
Fig. 26: Model evaluation in “Singulated” operating mode (cubic only)
• The 3D model maps the separately measured object.
• The SIM2000 system controller calculates the smallest enveloping cuboid for the
object and uses this cuboid to derive the dimensional values.
Measuring point
processing
Singulated
(cubic only)

 Loading...
Loading...




